 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeRF applied to satellite imagery for surface reconstruction
Apr 18, 2023
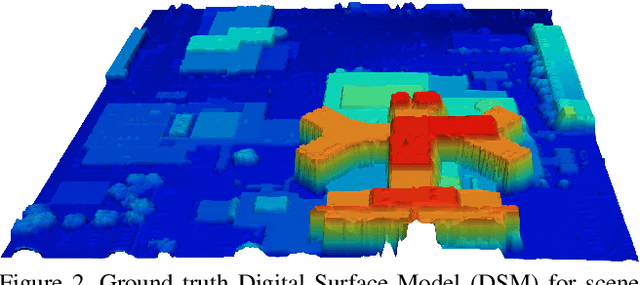
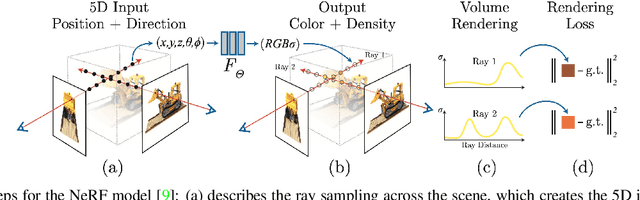
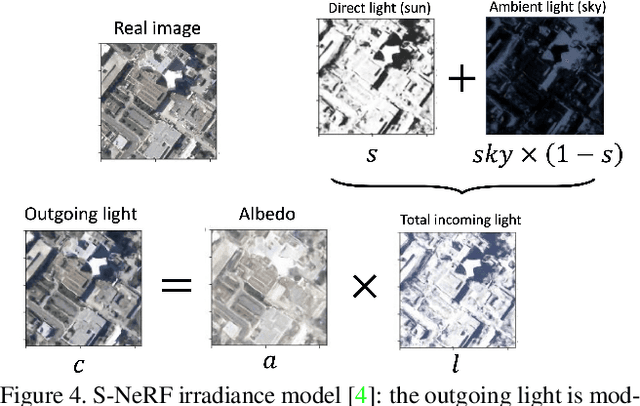
We present Surf-NeRF, a modified implementation of the recently introduced Shadow Neural Radiance Field (S-NeRF) model. This method is able to synthesize novel views from a sparse set of satellite images of a scene, while accounting for the variation in lighting present in the pictures. The trained model can also be used to accurately estimate the surface elevation of the scene, which is often a desirable quantity for satellite observation applications. S-NeRF improves on the standard Neural Radiance Field (NeRF) method by considering the radiance as a function of the albedo and the irradiance. Both these quantities are output by fully connected neural network branches of the model, and the latter is considered as a function of the direct light from the sun and the diffuse color from the sky. The implementations were run on a dataset of satellite images, augmented using a zoom-and-crop technique. A hyperparameter study for NeRF was carried out, leading to intriguing observations on the model's convergence. Finally, both NeRF and S-NeRF were run until 100k epochs in order to fully fit the data and produce their best possible predictions. The code related to this article can be found at https://github.com/fsemerar/surfnerf.
Gender Classification and Bias Mitigation in Facial Images
Jul 13, 2020
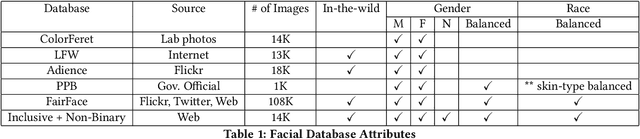


Gender classification algorithms have important applications in many domains today such as demographic research, law enforcement, as well as human-computer interaction. Recent research showed that algorithms trained on biased benchmark databases could result in algorithmic bias. However, to date, little research has been carried out on gender classification algorithms' bias towards gender minorities subgroups, such as the LGBTQ and the non-binary population, who have distinct characteristics in gender expression. In this paper, we began by conducting surveys on existing benchmark databases for facial recognition and gender classification tasks. We discovered that the current benchmark databases lack representation of gender minority subgroups. We worked on extending the current binary gender classifier to include a non-binary gender class. We did that by assembling two new facial image databases: 1) a racially balanced inclusive database with a subset of LGBTQ population 2) an inclusive-gender database that consists of people with non-binary gender. We worked to increase classification accuracy and mitigate algorithmic biases on our baseline model trained on the augmented benchmark database. Our ensemble model has achieved an overall accuracy score of 90.39%, which is a 38.72% increase from the baseline binary gender classifier trained on Adience. While this is an initial attempt towards mitigating bias in gender classification, more work is needed in modeling gender as a continuum by assembling more inclusive databases.
* 9 pages
Multi-Robot Path Deconfliction through Prioritization by Path Prospects
Aug 06, 2019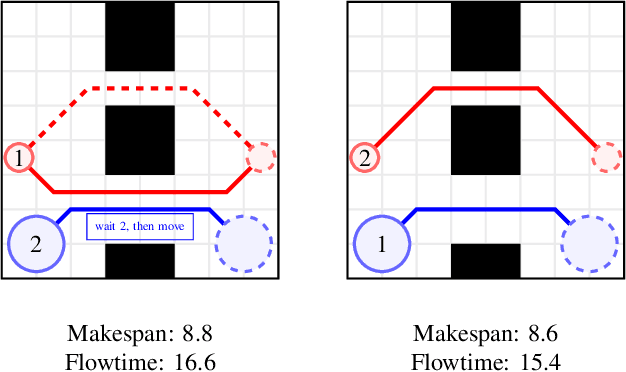

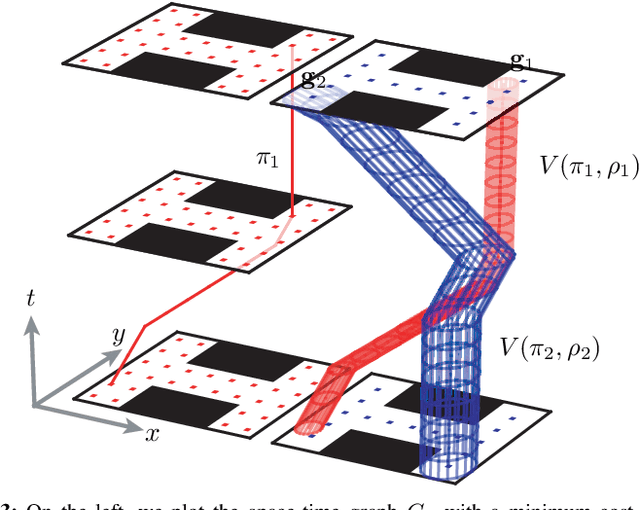
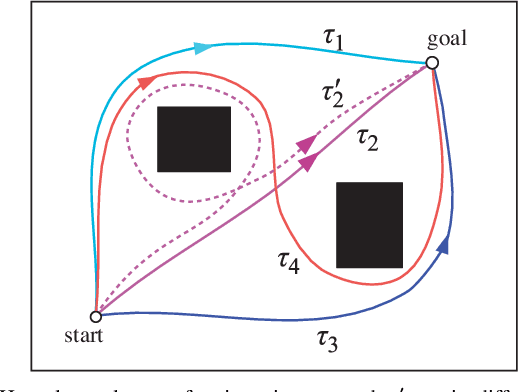
This work deals with the problem of planning conflict-free paths for mobile robots in cluttered environments. Since centralized, coupled planning algorithms are computationally intractable for large numbers of robots, we consider decoupled planning, in which robots plan their paths sequentially in order of priority. Choosing how to prioritize the robots is a key consideration. State-of-the-art prioritization heuristics, however, do not model the coupling between a robot's mobility and its environment. In this paper, we propose a prioritization rule that can be computed online by each robot independently, and that provides consistent, conflict-free path plans. Our innovation is to formalize a robot's path prospects to reach its goal from its current location. To this end, we consider the number of homology classes of trajectories, and use this as a prioritization rule in our decentralized path planning algorithm, whenever any robots enter negotiation to deconflict path plans. This prioritization rule guarantees a partial ordering over the robot set. We perform simulations that compare our method to five benchmarks, and show that it reaches the highest success rate (w.r.t. completeness), and that it strikes the best balance between makespan and flowtime objectives.