 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiDAR-based Real-Time Object Detection and Tracking in Dynamic Environments
Jul 04, 2024



In dynamic environments, the ability to detect and track moving objects in real-time is crucial for autonomous robots to navigate safely and effectively. Traditional methods for dynamic object detection rely on high accuracy odometry and maps to detect and track moving objects. However, these methods are not suitable for long-term operation in dynamic environments where the surrounding environment is constantly changing. In order to solve this problem, we propose a novel system for detecting and tracking dynamic objects in real-time using only LiDAR data. By emphasizing the extraction of low-frequency components from LiDAR data as feature points for foreground objects, our method significantly reduces the time required for object clustering and movement analysis. Additionally, we have developed a tracking approach that employs intensity-based ego-motion estimation along with a sliding window technique to assess object movements. This enables the precise identification of moving objects and enhances the system's resilience to odometry drift. Our experiments show that this system can detect and track dynamic objects in real-time with an average detection accuracy of 88.7\% and a recall rate of 89.1\%. Furthermore, our system demonstrates resilience against the prolonged drift typically associated with front-end only LiDAR odometry. All of the source code, labeled dataset, and the annotation tool are available at: https://github.com/MISTLab/lidar_dynamic_objects_detection.git
Real-Time Simultaneous Localization and Mapping with LiDAR intensity
Jan 23, 2023We propose a novel real-time LiDAR intensity image-based simultaneous localization and mapping method , which addresses the geometry degeneracy problem in unstructured environments. Traditional LiDAR-based front-end odometry mostly relies on geometric features such as points, lines and planes. A lack of these features in the environment can lead to the failure of the entire odometry system. To avoid this problem, we extract feature points from the LiDAR-generated point cloud that match features identified in LiDAR intensity images. We then use the extracted feature points to perform scan registration and estimate the robot ego-movement. For the back-end, we jointly optimize the distance between the corresponding feature points, and the point to plane distance for planes identified in the map. In addition, we use the features extracted from intensity images to detect loop closure candidates from previous scans and perform pose graph optimization. Our experiments show that our method can run in real time with high accuracy and works well with illumination changes, low-texture, and unstructured environments.
Enhanced exemplar autoencoder with cycle consistency loss in any-to-one voice conversion
Apr 12, 2022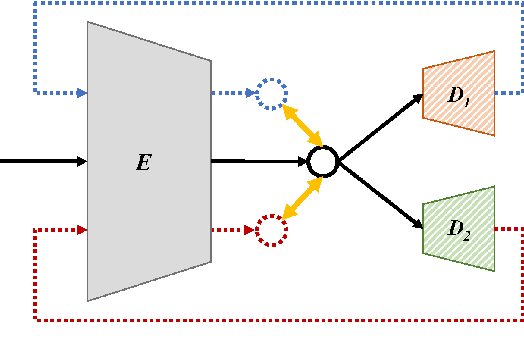
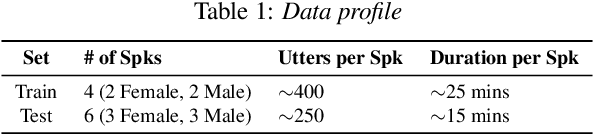
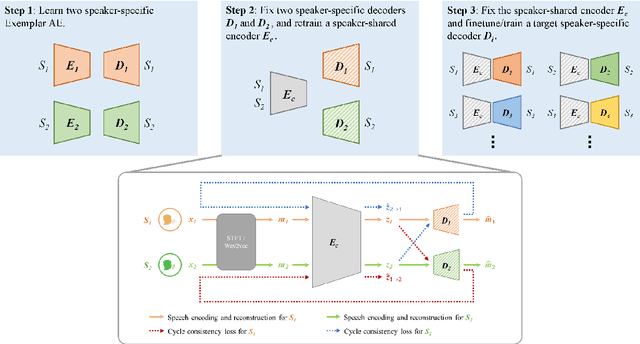
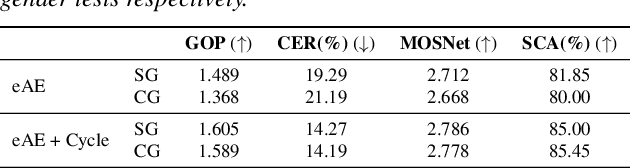
Recent research showed that an autoencoder trained with speech of a single speaker, called exemplar autoencoder (eAE), can be used for any-to-one voice conversion (VC). Compared to large-scale many-to-many models such as AutoVC, the eAE model is easy and fast in training, and may recover more details of the target speaker. To ensure VC quality, the latent code should represent and only represent content information. However, this is not easy to attain for eAE as it is unaware of any speaker variation in model training. To tackle the problem, we propose a simple yet effective approach based on a cycle consistency loss. Specifically, we train eAEs of multiple speakers with a shared encoder, and meanwhile encourage the speech reconstructed from any speaker-specific decoder to get a consistent latent code as the original speech when cycled back and encoded again. Experiments conducted on the AISHELL-3 corpus showed that this new approach improved the baseline eAE consistently. The source code and examples are available at the project page: http://project.cslt.org/.
C-P Map: A Novel Evaluation Toolkit for Speaker Verification
Mar 06, 2022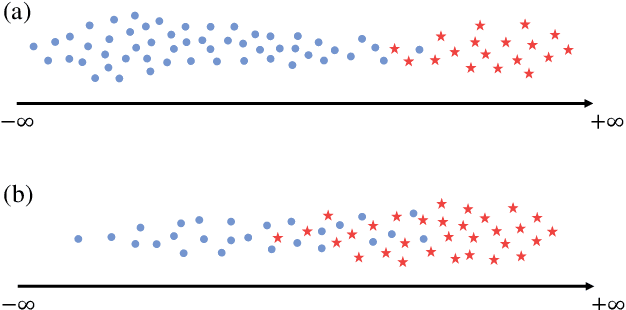
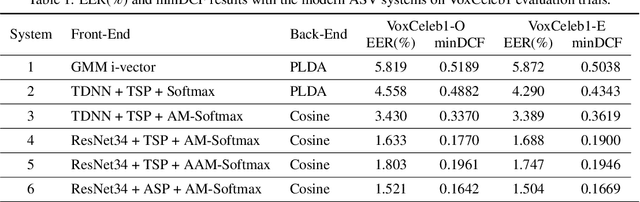
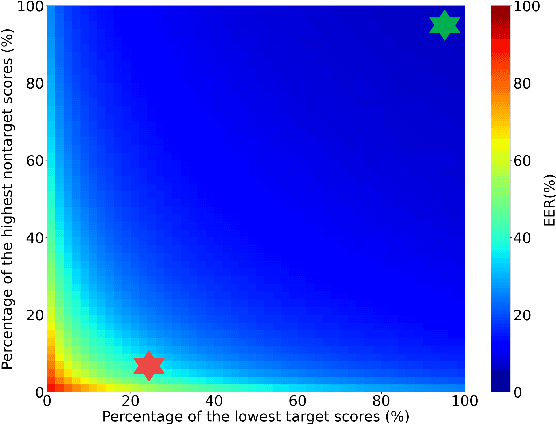
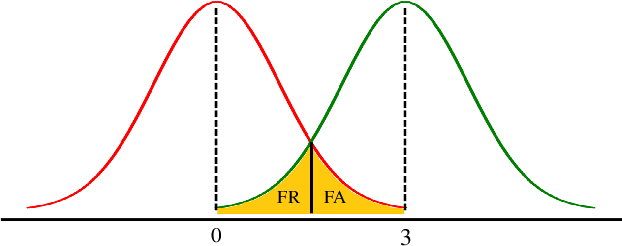
Evaluation trials are used to probe performance of automatic speaker verification (ASV) systems. In spite of the clear importance and impact, evaluation trials have not been seriously treated in research and engineering practice. This paper firstly presents a theoretical analysis on evaluation trials and highlights potential bias with the most popular cross-pairing approach used in trials design. To interpret and settle this problem, we define the concept of trial config and C-P map derived from it. The C-P map measures the performance of an ASV system on various trial configs in a 2-dimensional map. On the map, each location represents a particular trial config and its corresponding color represents the system performance. Experiments conducted on representative ASV systems show that the proposed C-P map offers a powerful evaluation toolkit for ASV performance analysis and comparison. The source code for C-P map has been release at https://gitlab.com/csltstu/sunine.