 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntention-based and Risk-Aware Trajectory Prediction for Autonomous Driving in Complex Traffic Scenarios
Sep 24, 2024
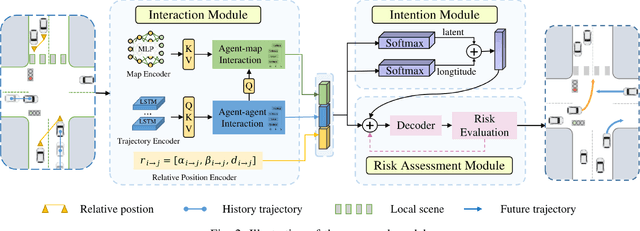
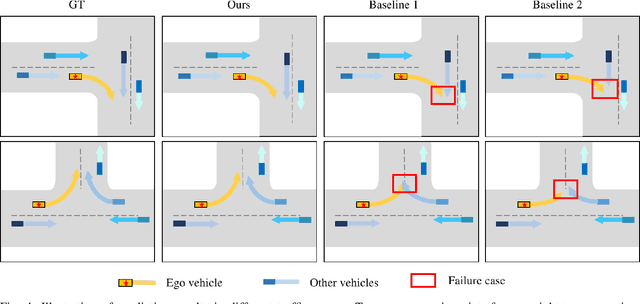
Accurately predicting the trajectory of surrounding vehicles is a critical challenge for autonomous vehicles. In complex traffic scenarios, there are two significant issues with the current autonomous driving system: the cognitive uncertainty of prediction and the lack of risk awareness, which limit the further development of autonomous driving. To address this challenge, we introduce a novel trajectory prediction model that incorporates insights and principles from driving behavior, ethical decision-making, and risk assessment. Based on joint prediction, our model consists of interaction, intention, and risk assessment modules. The dynamic variation of interaction between vehicles can be comprehensively captured at each timestamp in the interaction module. Based on interaction information, our model considers primary intentions for vehicles to enhance the diversity of trajectory generation. The optimization of predicted trajectories follows the advanced risk-aware decision-making principles. Experimental results are evaluated on the DeepAccident dataset; our approach shows its remarkable prediction performance on normal and accident scenarios and outperforms the state-of-the-art algorithms by at least 28.9\% and 26.5\%, respectively. The proposed model improves the proficiency and adaptability of trajectory prediction in complex traffic scenarios. The code for the proposed model is available at https://sites.google.com/view/ir-prediction.
Ethical Decision-making for Autonomous Driving based on LSTM Trajectory Prediction Network
Aug 02, 2023The development of autonomous vehicles has brought a great impact and changes to the transportation industry, offering numerous benefits in terms of safety and efficiency. However, one of the key challenges that autonomous driving faces is how to make ethical decisions in complex situations. To address this issue, in this article, a novel trajectory prediction method is proposed to achieve ethical decision-making for autonomous driving. Ethical considerations are integrated into the decision-making process of autonomous vehicles by quantifying the utility principle and incorporating them into mathematical formulas. Furthermore, trajectory prediction is optimized using LSTM network with an attention module, resulting in improved accuracy and reliability in trajectory planning and selection. Through extensive simulation experiments, we demonstrate the effectiveness of the proposed method in making ethical decisions and selecting optimal trajectories.
Line Art Correlation Matching Network for Automatic Animation Colorization
Apr 14, 2020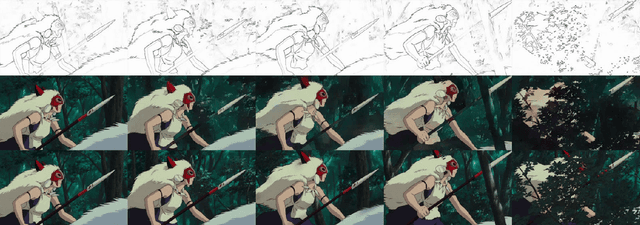
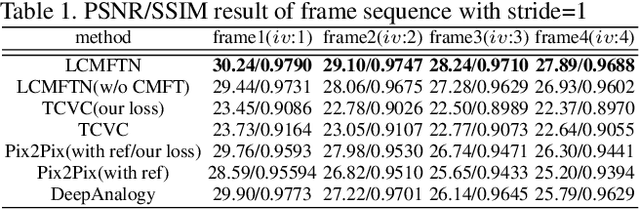
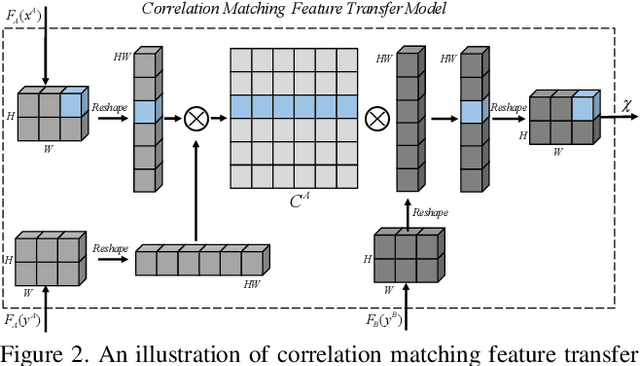
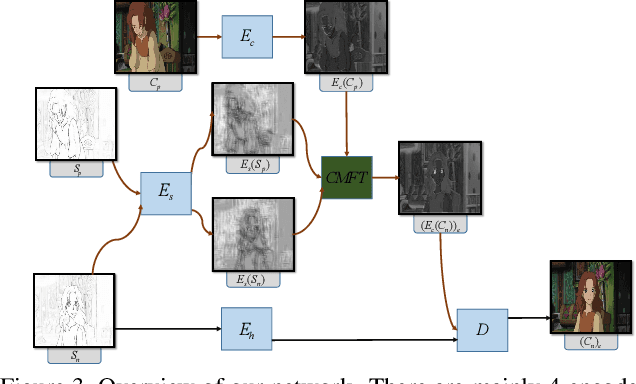
Automatic animation line art colorization is a challenging computer vision problem since line art is a highly sparse and abstracted information and there exists a strict requirement for the color and style consistency between frames. Recently, a lot of GAN(Generative Adversarial Network) based image-to-image transfer method for single line art colorization has emerged. They can generate perceptually appealing result conditioned on line art. However,these methods can not be adopted to the task of animation colorization because of the lack of consideration of in-between frame consistency. Existing methods simply input the previous colored frame as a reference to color the next line art, which will mislead the colorization due to the spatial misalignment of the previous colored frame and the next line art especially at positions where apparent changes happen. To address these challenges, we design a kind of matching model called CM(co-rrelation matching) to align the colored reference in an learnable way and integrate the model into an U-Net structure generator in a coarse-to-fine manner. Extension evaluations shows that CM model can effectively improve the in-between consistency and generating quality expecially when the motion is intense and diverse.
Learning Myelin Content in Multiple Sclerosis from Multimodal MRI through Adversarial Training
Jun 08, 2018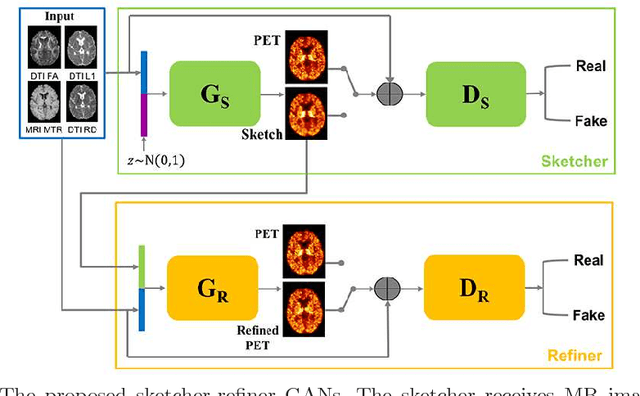
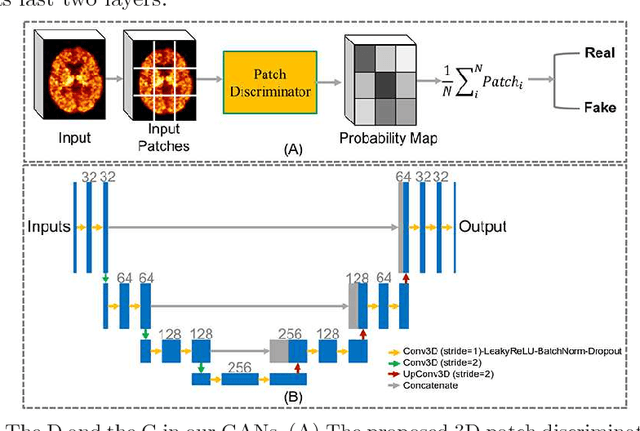
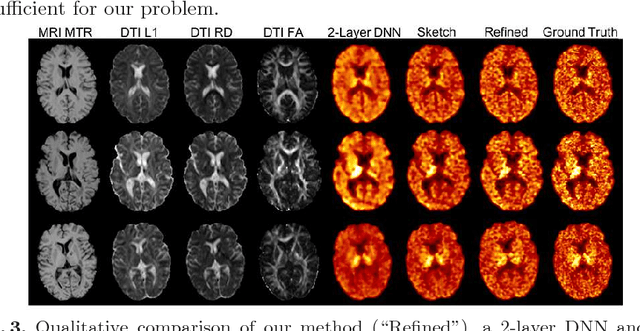
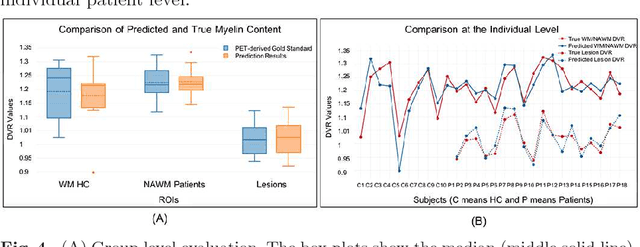
Multiple sclerosis (MS) is a demyelinating disease of the central nervous system (CNS). A reliable measure of the tissue myelin content is therefore essential for the understanding of the physiopathology of MS, tracking progression and assessing treatment efficacy. Positron emission tomography (PET) with $[^{11} \mbox{C}] \mbox{PIB}$ has been proposed as a promising biomarker for measuring myelin content changes in-vivo in MS. However, PET imaging is expensive and invasive due to the injection of a radioactive tracer. On the contrary, magnetic resonance imaging (MRI) is a non-invasive, widely available technique, but existing MRI sequences do not provide, to date, a reliable, specific, or direct marker of either demyelination or remyelination. In this work, we therefore propose Sketcher-Refiner Generative Adversarial Networks (GANs) with specifically designed adversarial loss functions to predict the PET-derived myelin content map from a combination of MRI modalities. The prediction problem is solved by a sketch-refinement process in which the sketcher generates the preliminary anatomical and physiological information and the refiner refines and generates images reflecting the tissue myelin content in the human brain. We evaluated the ability of our method to predict myelin content at both global and voxel-wise levels. The evaluation results show that the demyelination in lesion regions and myelin content in normal-appearing white matter (NAWM) can be well predicted by our method. The method has the potential to become a useful tool for clinical management of patients with MS.