 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Humanoid Navigation from Human Data
Apr 01, 2026We present EgoNav, a system that enables a humanoid robot to traverse diverse, unseen environments by learning entirely from 5 hours of human walking data, with no robot data or finetuning. A diffusion model predicts distributions of plausible future trajectories conditioned on past trajectory, a 360 deg visual memory fusing color, depth, and semantics, and video features from a frozen DINOv3 backbone that capture appearance cues invisible to depth sensors. A hybrid sampling scheme achieves real-time inference in 10 denoising steps, and a receding-horizon controller selects paths from the predicted distribution. We validate EgoNav through offline evaluations, where it outperforms baselines in collision avoidance and multi-modal coverage, and through zero-shot deployment on a Unitree G1 humanoid across unseen indoor and outdoor environments. Behaviors such as waiting for doors to open, navigating around crowds, and avoiding glass walls emerge naturally from the learned prior. We will release the dataset and trained models. Our website: https://egonav.weizhuowang.com
Minimalist Compliance Control
Mar 01, 2026Compliance control is essential for safe physical interaction, yet its adoption is limited by hardware requirements such as force torque sensors. While recent reinforcement learning approaches aim to bypass these constraints, they often suffer from sim-to-real gaps, lack safety guarantees, and add system complexity. We propose Minimalist Compliance Control, which enables compliant behavior using only motor current or voltage signals readily available in modern servos and quasi-direct-drive motors, without force sensors, current control, or learning. External wrenches are estimated from actuator signals and Jacobians and incorporated into a task-space admittance controller, preserving sufficient force measurement accuracy for stable and responsive compliance control. Our method is embodiment-agnostic and plug-and-play with diverse high-level planners. We validate our approach on a robot arm, a dexterous hand, and two humanoid robots across multiple contact-rich tasks, using vision-language models, imitation learning, and model-based planning. The results demonstrate robust, safe, and compliant interaction across embodiments and planning paradigms.
Locomotion Beyond Feet
Jan 07, 2026Most locomotion methods for humanoid robots focus on leg-based gaits, yet natural bipeds frequently rely on hands, knees, and elbows to establish additional contacts for stability and support in complex environments. This paper introduces Locomotion Beyond Feet, a comprehensive system for whole-body humanoid locomotion across extremely challenging terrains, including low-clearance spaces under chairs, knee-high walls, knee-high platforms, and steep ascending and descending stairs. Our approach addresses two key challenges: contact-rich motion planning and generalization across diverse terrains. To this end, we combine physics-grounded keyframe animation with reinforcement learning. Keyframes encode human knowledge of motor skills, are embodiment-specific, and can be readily validated in simulation or on hardware, while reinforcement learning transforms these references into robust, physically accurate motions. We further employ a hierarchical framework consisting of terrain-specific motion-tracking policies, failure recovery mechanisms, and a vision-based skill planner. Real-world experiments demonstrate that Locomotion Beyond Feet achieves robust whole-body locomotion and generalizes across obstacle sizes, obstacle instances, and terrain sequences.
Robot Trains Robot: Automatic Real-World Policy Adaptation and Learning for Humanoids
Aug 17, 2025Simulation-based reinforcement learning (RL) has significantly advanced humanoid locomotion tasks, yet direct real-world RL from scratch or adapting from pretrained policies remains rare, limiting the full potential of humanoid robots. Real-world learning, despite being crucial for overcoming the sim-to-real gap, faces substantial challenges related to safety, reward design, and learning efficiency. To address these limitations, we propose Robot-Trains-Robot (RTR), a novel framework where a robotic arm teacher actively supports and guides a humanoid robot student. The RTR system provides protection, learning schedule, reward, perturbation, failure detection, and automatic resets. It enables efficient long-term real-world humanoid training with minimal human intervention. Furthermore, we propose a novel RL pipeline that facilitates and stabilizes sim-to-real transfer by optimizing a single dynamics-encoded latent variable in the real world. We validate our method through two challenging real-world humanoid tasks: fine-tuning a walking policy for precise speed tracking and learning a humanoid swing-up task from scratch, illustrating the promising capabilities of real-world humanoid learning realized by RTR-style systems. See https://robot-trains-robot.github.io/ for more info.
ToddlerBot: Open-Source ML-Compatible Humanoid Platform for Loco-Manipulation
Feb 02, 2025
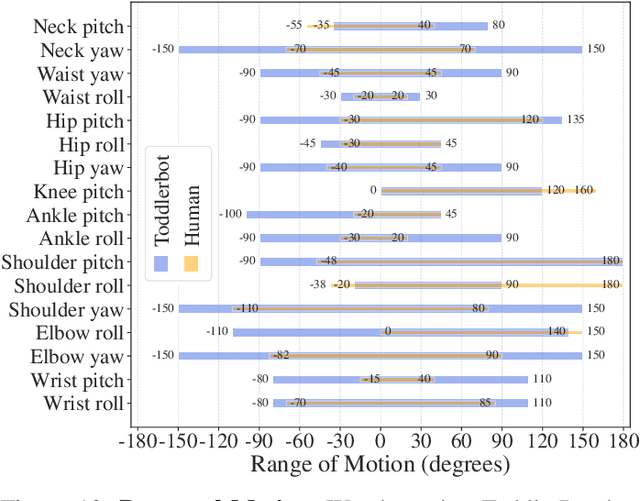


Learning-based robotics research driven by data demands a new approach to robot hardware design-one that serves as both a platform for policy execution and a tool for embodied data collection to train policies. We introduce ToddlerBot, a low-cost, open-source humanoid robot platform designed for scalable policy learning and research in robotics and AI. ToddlerBot enables seamless acquisition of high-quality simulation and real-world data. The plug-and-play zero-point calibration and transferable motor system identification ensure a high-fidelity digital twin, enabling zero-shot policy transfer from simulation to the real world. A user-friendly teleoperation interface facilitates streamlined real-world data collection for learning motor skills from human demonstrations. Utilizing its data collection ability and anthropomorphic design, ToddlerBot is an ideal platform to perform whole-body loco-manipulation. Additionally, ToddlerBot's compact size (0.56m, 3.4kg) ensures safe operation in real-world environments. Reproducibility is achieved with an entirely 3D-printed, open-source design and commercially available components, keeping the total cost under 6,000 USD. Comprehensive documentation allows assembly and maintenance with basic technical expertise, as validated by a successful independent replication of the system. We demonstrate ToddlerBot's capabilities through arm span, payload, endurance tests, loco-manipulation tasks, and a collaborative long-horizon scenario where two robots tidy a toy session together. By advancing ML-compatibility, capability, and reproducibility, ToddlerBot provides a robust platform for scalable learning and dynamic policy execution in robotics research.
Egocentric Scene-aware Human Trajectory Prediction
Mar 30, 2024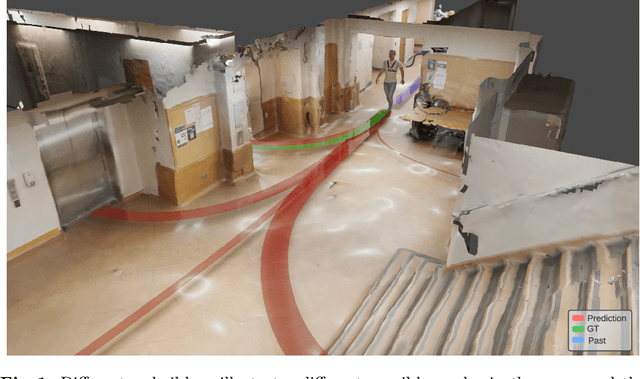

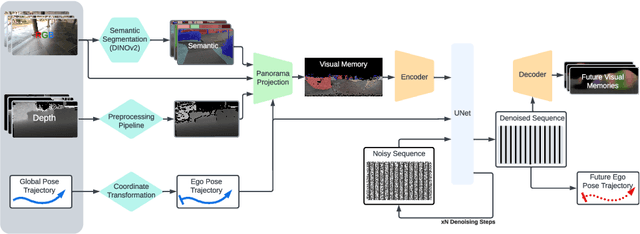

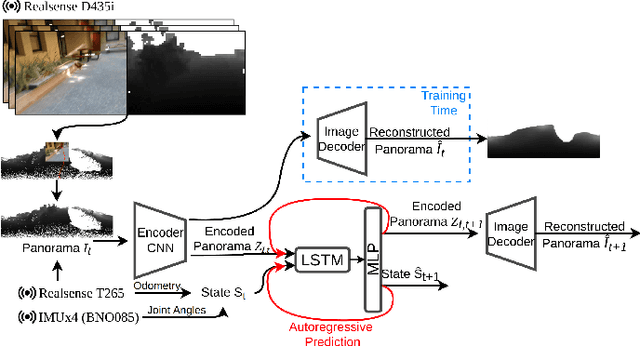
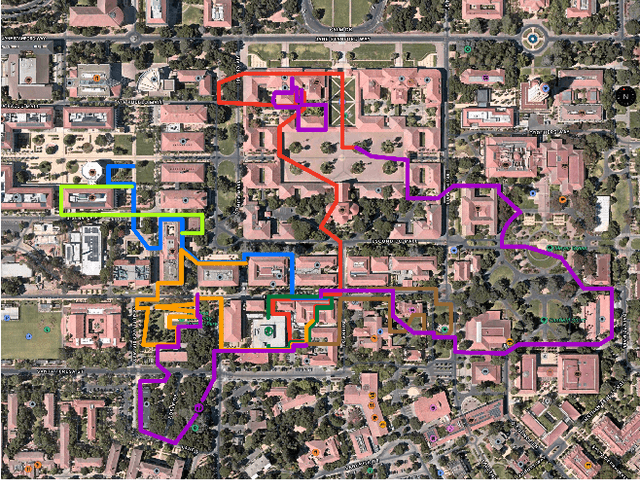
Wearable collaborative robots stand to assist human wearers who need fall prevention assistance or wear exoskeletons. Such a robot needs to be able to predict the ego motion of the wearer based on egocentric vision and the surrounding scene. In this work, we leveraged body-mounted cameras and sensors to anticipate the trajectory of human wearers through complex surroundings. To facilitate research in ego-motion prediction, we have collected a comprehensive walking scene navigation dataset centered on the user's perspective. We present a method to predict human motion conditioning on the surrounding static scene. Our method leverages a diffusion model to produce a distribution of potential future trajectories, taking into account the user's observation of the environment. We introduce a compact representation to encode the user's visual memory of the surroundings, as well as an efficient sample-generating technique to speed up real-time inference of a diffusion model. We ablate our model and compare it to baselines, and results show that our model outperforms existing methods on key metrics of collision avoidance and trajectory mode coverage.
DexCap: Scalable and Portable Mocap Data Collection System for Dexterous Manipulation
Mar 12, 2024Imitation learning from human hand motion data presents a promising avenue for imbuing robots with human-like dexterity in real-world manipulation tasks. Despite this potential, substantial challenges persist, particularly with the portability of existing hand motion capture (mocap) systems and the difficulty of translating mocap data into effective control policies. To tackle these issues, we introduce DexCap, a portable hand motion capture system, alongside DexIL, a novel imitation algorithm for training dexterous robot skills directly from human hand mocap data. DexCap offers precise, occlusion-resistant tracking of wrist and finger motions based on SLAM and electromagnetic field together with 3D observations of the environment. Utilizing this rich dataset, DexIL employs inverse kinematics and point cloud-based imitation learning to replicate human actions with robot hands. Beyond learning from human motion, DexCap also offers an optional human-in-the-loop correction mechanism to refine and further improve robot performance. Through extensive evaluation across six dexterous manipulation tasks, our approach not only demonstrates superior performance but also showcases the system's capability to effectively learn from in-the-wild mocap data, paving the way for future data collection methods for dexterous manipulation. More details can be found at https://dex-cap.github.io
Trajectory and Sway Prediction Towards Fall Prevention
Sep 23, 2022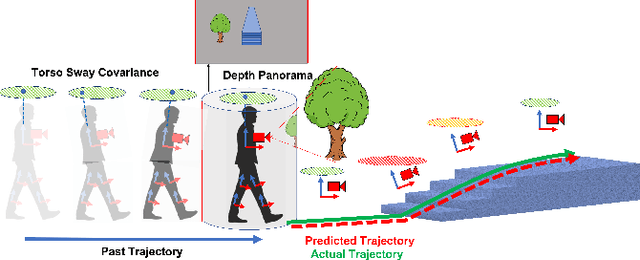
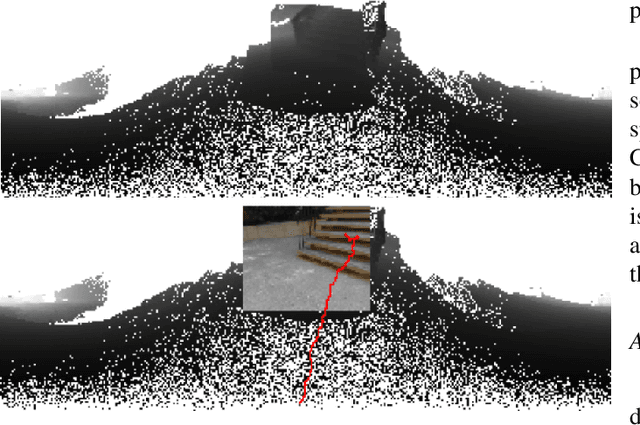
Falls are the leading cause of fatal and non-fatal injuries particularly for older persons. Imbalance can result from body internal causes such as illness, or external causes such as active or passive perturbation. Active perturbation is the result of applying an external force to a person, while passive perturbation results from human motion interacting with a static obstacle. This work proposes a metric that allows for the monitoring of the persons torso and its correlation to active and passive perturbations. We show that large change in the torso sway can be strongly correlated to active perturbations. We also show that by conditioning the expected path and torso sway on the past trajectory, torso motion and the surrounding scene, we can reasonably predict the future path and expected change in torso sway. This will have direct future application to fall prevention. The results demonstrated that the torso sway is strongly correlated with perturbations. And our model is able to make use of the visual cues presented in the panorama and condition the prediction accordingly.