 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoadPainter: Points Are Ideal Navigators for Topology transformER
Jul 22, 2024



Topology reasoning aims to provide a precise understanding of road scenes, enabling autonomous systems to identify safe and efficient routes. In this paper, we present RoadPainter, an innovative approach for detecting and reasoning the topology of lane centerlines using multi-view images. The core concept behind RoadPainter is to extract a set of points from each centerline mask to improve the accuracy of centerline prediction. We start by implementing a transformer decoder that integrates a hybrid attention mechanism and a real-virtual separation strategy to predict coarse lane centerlines and establish topological associations. Then, we generate centerline instance masks guided by the centerline points from the transformer decoder. Moreover, we derive an additional set of points from each mask and combine them with previously detected centerline points for further refinement. Additionally, we introduce an optional module that incorporates a Standard Definition (SD) map to further optimize centerline detection and enhance topological reasoning performance. Experimental evaluations on the OpenLane-V2 dataset demonstrate the state-of-the-art performance of RoadPainter.
DeepICP: An End-to-End Deep Neural Network for 3D Point Cloud Registration
May 10, 2019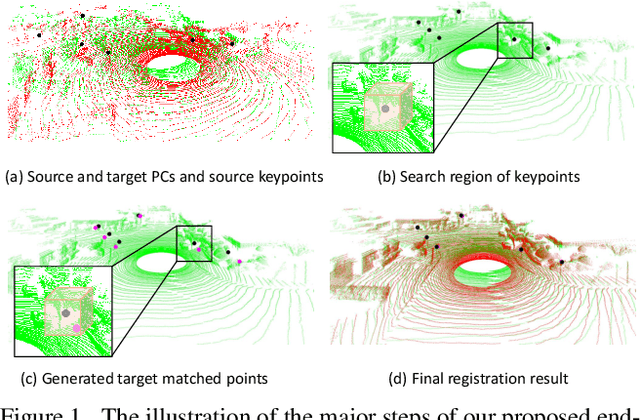
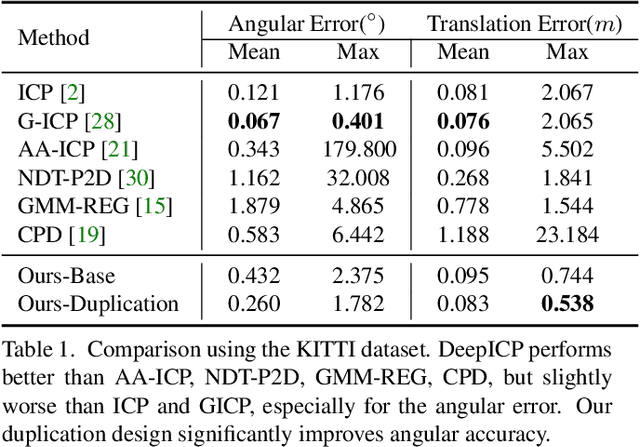
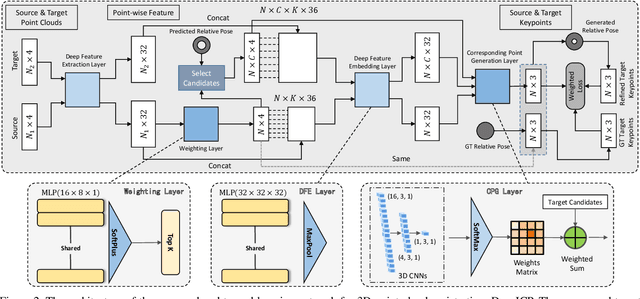
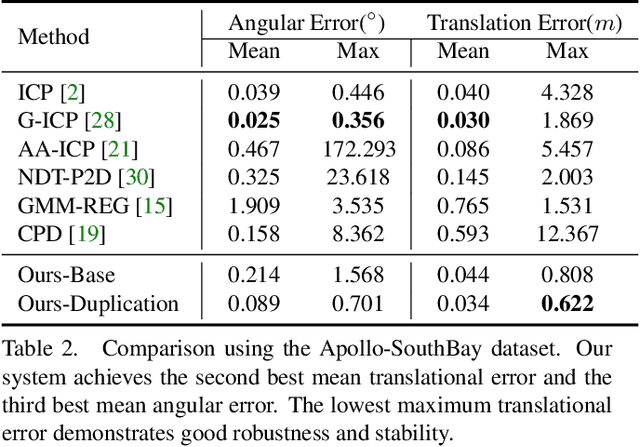
We present DeepICP - a novel end-to-end learning-based 3D point cloud registration framework that achieves comparable registration accuracy to prior state-of-the-art geometric methods. Different from other keypoint based methods where a RANSAC procedure is usually needed, we implement the use of various deep neural network structures to establish an end-to-end trainable network. Our keypoint detector is trained through this end-to-end structure and enables the system to avoid the inference of dynamic objects, leverages the help of sufficiently salient features on stationary objects, and as a result, achieves high robustness. Rather than searching the corresponding points among existing points, the key contribution is that we innovatively generate them based on learned matching probabilities among a group of candidates, which can boost the registration accuracy. Our loss function incorporates both the local similarity and the global geometric constraints to ensure all above network designs can converge towards the right direction. We comprehensively validate the effectiveness of our approach using both the KITTI dataset and the Apollo-SouthBay dataset. Results demonstrate that our method achieves comparable or better performance than the state-of-the-art geometry-based methods. Detailed ablation and visualization analysis are included to further illustrate the behavior and insights of our network. The low registration error and high robustness of our method makes it attractive for substantial applications relying on the point cloud registration task.