 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn ADMM-Based Geometric Configuration Optimization in RSSD-Based Source Localization By UAVs with Spread Angle Constraint
Nov 24, 2023



Deploying multiple unmanned aerial vehicles (UAVs) to locate a signal-emitting source covers a wide range of military and civilian applications like rescue and target tracking. It is well known that the UAVs-source (sensors-target) geometry, namely geometric configuration, significantly affects the final localization accuracy. This paper focuses on the geometric configuration optimization for received signal strength difference (RSSD)-based passive source localization by drone swarm. Different from prior works, this paper considers a general measuring condition where the spread angle of drone swarm centered on the source is constrained. Subject to this constraint, a geometric configuration optimization problem with the aim of maximizing the determinant of Fisher information matrix (FIM) is formulated. After transforming this problem using matrix theory, an alternating direction method of multipliers (ADMM)-based optimization framework is proposed. To solve the subproblems in this framework, two global optimal solutions based on the Von Neumann matrix trace inequality theorem and majorize-minimize (MM) algorithm are proposed respectively. Finally, the effectiveness as well as the practicality of the proposed ADMM-based optimization algorithm are demonstrated by extensive simulations.
Machine Learning Methods for Inferring the Number of Passive Emitters via Massive MIMO Receive Array
Mar 02, 2022
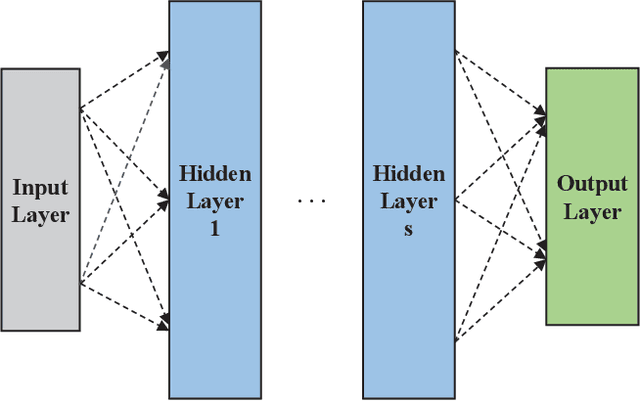

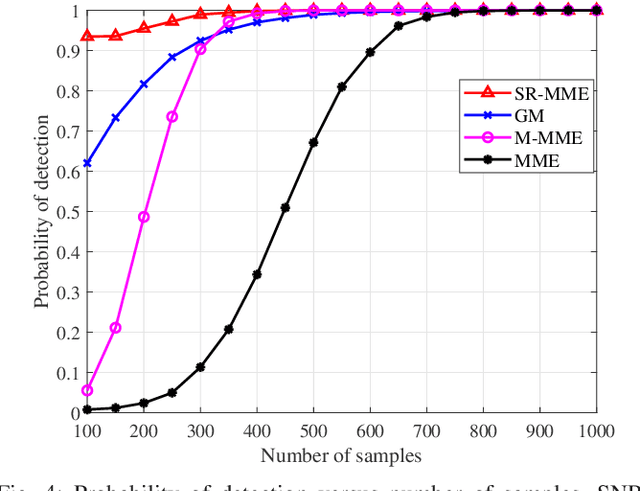
To improve the efficiency and accuracy of direction finding with massive MIMO receive array, it is necessary to determine the specific number of signal emitters in advance. In this paper, we present a complete DOA preprocessing system for inferring the number of passive emitters. Firstly, in order to improve the accuracy of detecting the number of signals, two high-precision signal detectors, square root of maximum eigenvalue times minimum eigenvalue (SR-MME) and geometric mean (GM), are proposed. Compared to other detectors, SR-MME and GM can achieve a high detection probability while maintaining extremely low false alarm probability. Secondly, if the existence of emitters is determined by detectors, we need to further confirm their number, that is a problem of pattern classification. Therefore, we perform feature extraction on the the eigenvalue sequence of sample covariance matrix to construct feature vector and innovatively propose a multi-layer neural network (ML-NN). Additionally, the support vector machine (SVM), and naive Bayesian classifier (NBC) are also designed. The simulation results show that the machine learning-based methods can achieve good results in signal classification, especially neural networks, which can always maintain the classification accuracy above 70\% with massive MIMO receive array. Finally, we analyze the classical signal classification methods, Akaike (AIC) and Minimum description length (MDL). It is concluded that the two methods are not suitable for scenarios with massive receive arrays, and they also have much worse performance than machine learning-based classifiers.
Communication-efficient Coordinated RSS-based Distributed Passive Localization via Drone Cluster
Apr 01, 2021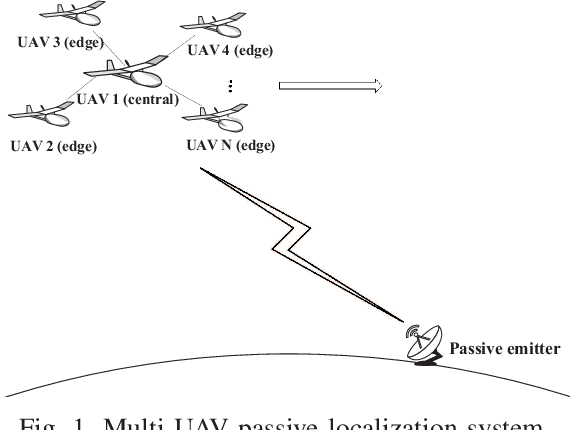
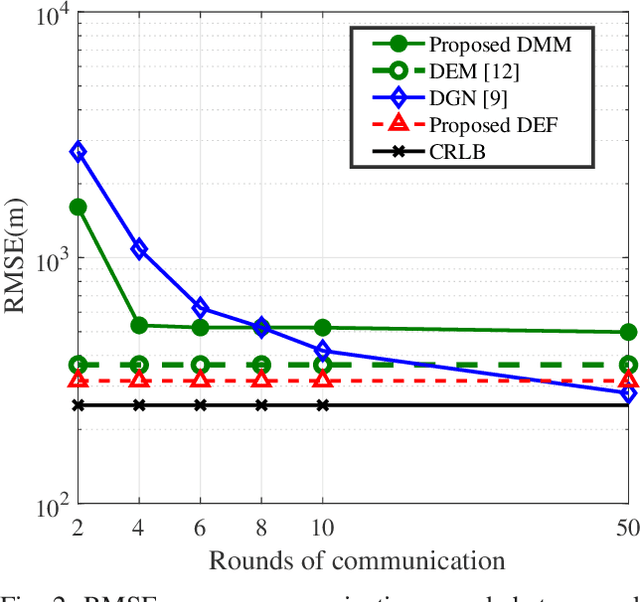
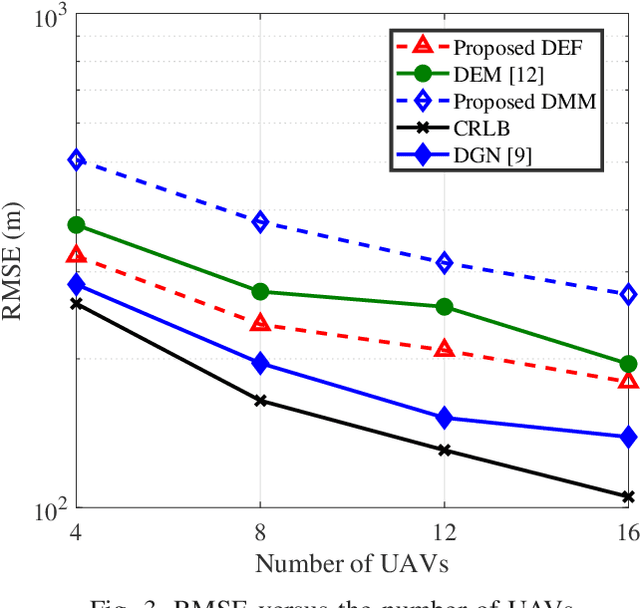
Recently, passive unmanned aerial vehicle (UAV) localization has become popular due to mobility and convenience. In this paper, we consider a scenario of using distributed drone cluster to estimate the position of a passive emitter via received signal strength (RSS). First, a distributed majorizeminimization (DMM) RSS-based localization method is proposed. To accelerate its convergence, a tight upper bound of the objective function from the primary one is derived. Furthermore, to reduce communication overhead, a distributed estimation scheme using the Fisher information matrix (DEF) is presented, with only requiring one-round communication between edge UAVs and center UAV. Additionally, a local search solution is used as the initial value of DEF. Simulation results show that the proposed DMM performs better than the existing distributed Gauss-Newton method (DGN) in terms of root of mean square error (RMSE) under a limited low communication overhead constraint. Moreover, the proposed DEF performs much better than MM in terms of RMSE, but has a higher computational complexity than the latter.
CRED: A Deep Residual Network of Convolutional and Recurrent Units for Earthquake Signal Detection
Oct 03, 2018
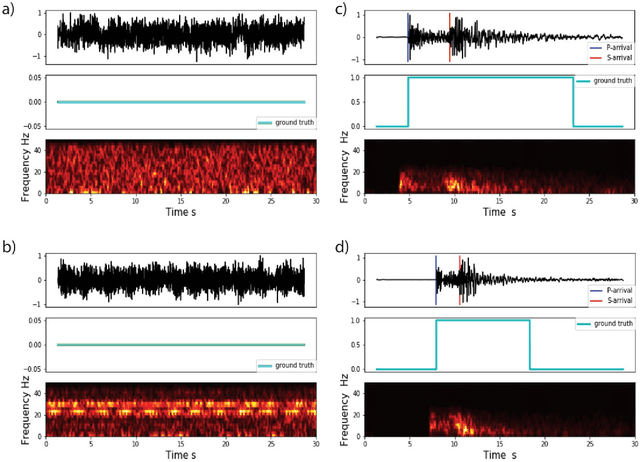
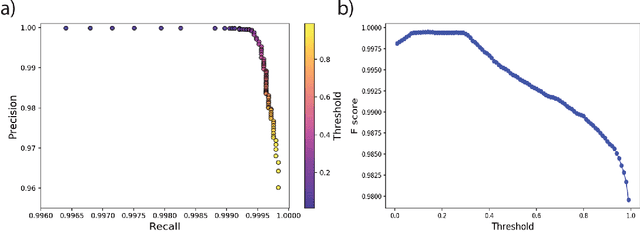
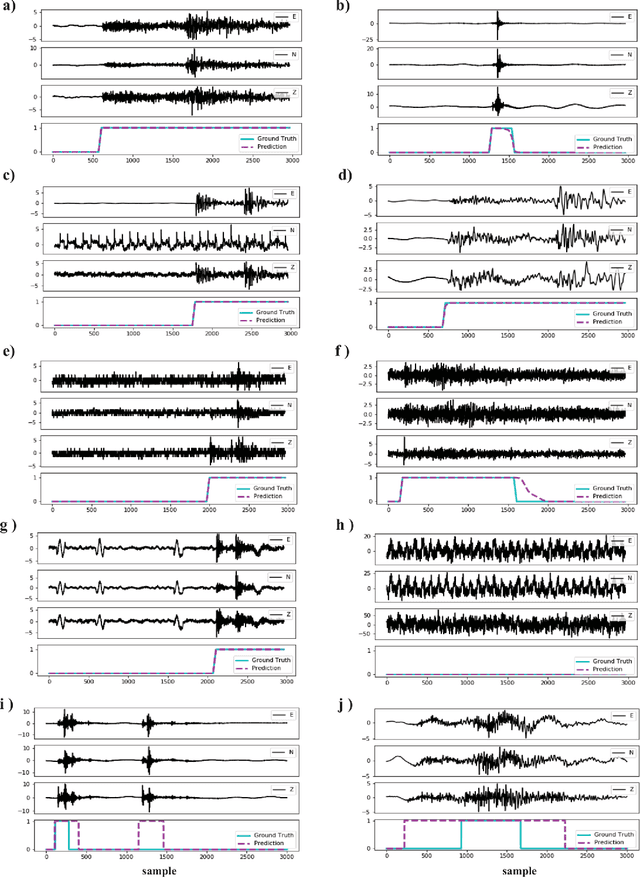
Earthquake signal detection is at the core of observational seismology. A good detection algorithm should be sensitive to small and weak events with a variety of waveform shapes, robust to background noise and non-earthquake signals, and efficient for processing large data volumes. Here, we introduce the Cnn-Rnn Earthquake Detector (CRED), a detector based on deep neural networks. The network uses a combination of convolutional layers and bi-directional long-short-term memory units in a residual structure. It learns the time-frequency characteristics of the dominant phases in an earthquake signal from three component data recorded on a single station. We train the network using 500,000 seismograms (250k associated with tectonic earthquakes and 250k identified as noise) recorded in Northern California and tested it with an F-score of 99.95. The robustness of the trained model with respect to the noise level and non-earthquake signals is shown by applying it to a set of semi-synthetic signals. The model is applied to one month of continuous data recorded at Central Arkansas to demonstrate its efficiency, generalization, and sensitivity. Our model is able to detect more than 700 microearthquakes as small as -1.3 ML induced during hydraulic fracturing far away than the training region. The performance of the model is compared with STA/LTA, template matching, and FAST algorithms. Our results indicate an efficient and reliable performance of CRED. This framework holds great promise in lowering the detection threshold while minimizing false positive detection rates.