 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvestigation on data fusion of sun-induced chlorophyll fluorescence and reflectance for photosynthetic capacity of rice
Dec 01, 2023
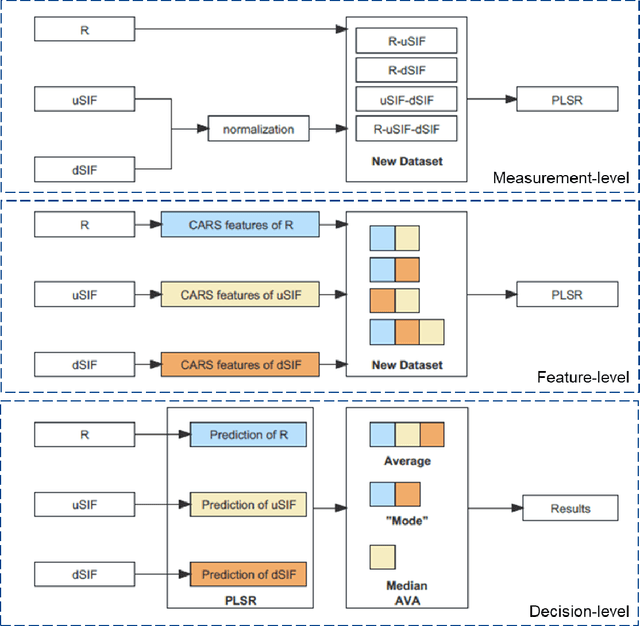


Studying crop photosynthesis is crucial for improving yield, but current methods are labor-intensive. This research aims to enhance accuracy by combining leaf reflectance and sun-induced chlorophyll fluorescence (SIF) signals to estimate key photosynthetic traits in rice. The study analyzes 149 leaf samples from two rice cultivars, considering reflectance, SIF, chlorophyll, carotenoids, and CO2 response curves. After noise removal, SIF and reflectance spectra are used for data fusion at different levels (raw, feature, and decision). Competitive adaptive reweighted sampling (CARS) extracts features, and partial least squares regression (PLSR) builds regression models. Results indicate that using either reflectance or SIF alone provides modest estimations for photosynthetic traits. However, combining these data sources through measurement-level data fusion significantly improves accuracy, with mid-level and decision-level fusion also showing positive outcomes. In particular, decision-level fusion enhances predictive capabilities, suggesting the potential for efficient crop phenotyping. Overall, sun-induced chlorophyll fluorescence spectra effectively predict rice's photosynthetic capacity, and data fusion methods contribute to increased accuracy, paving the way for high-throughput crop phenotyping.
A total hip surgery robot system based on intelligent positioning and optical measurement
Jun 15, 2022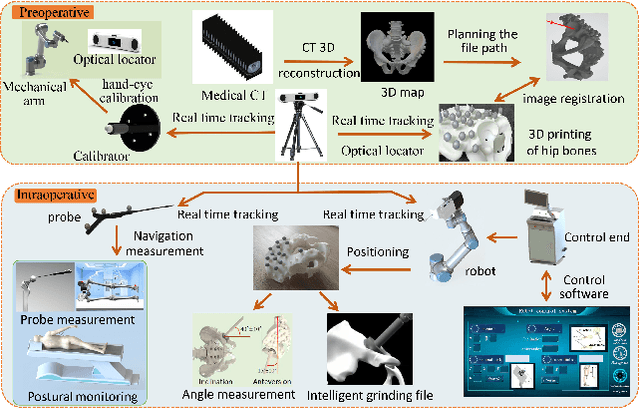
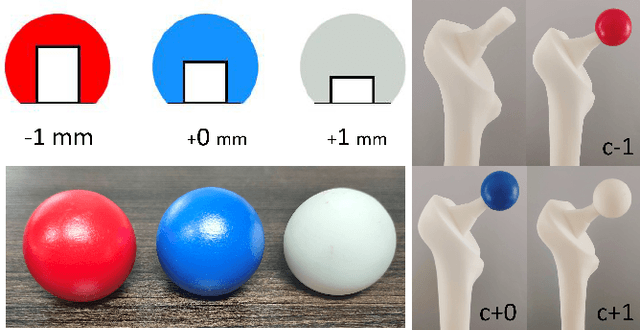
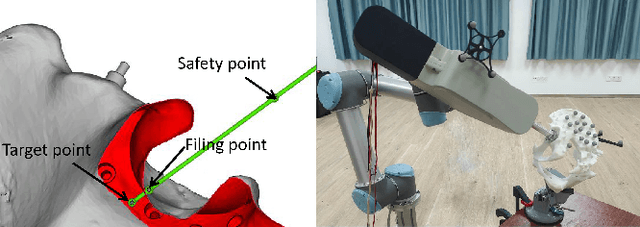
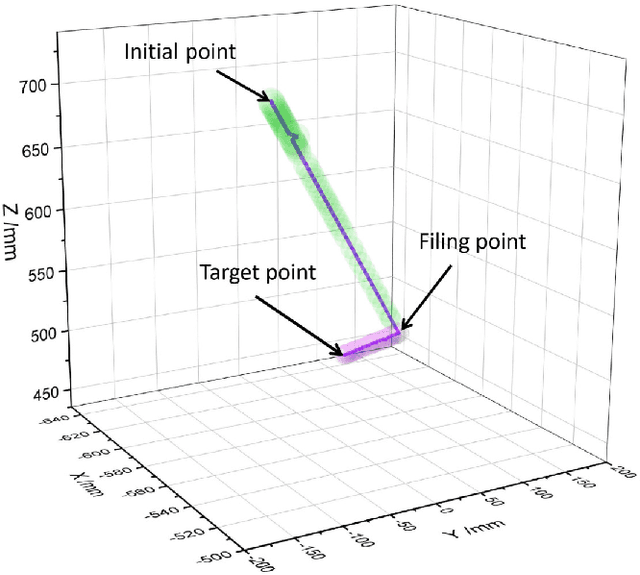
This paper represents the development and experimental evaluation of an autonomous navigation surgical robot system for total hip arthroplasty (THA). Existing robotic systems used in joint replacement surgery have achieved good clinical results, with reported better accuracy. While the surgeon needs to locate the robot arm to the target position during the operation, which is easily affected by the doctor of experience. Yet, the hand-hold acetabulum reamer is easy to appear with uneven strength and grinding file. Further, the lack of steps to measure the femoral neck length may lead to poor results.To tackle this challenge, our design contains the real-time traceable optical positioning strategy to reduce unnecessary manual adjustments to the robotic arm during surgery, the intelligent end-effector system to stable the grinding, and the optical probe to provide real-time measurement of femoral neck length and other parameters to choose the prosthesis. The length of the lower limbs was measured as the prosthesis was installed. Experimental evaluation showed that the robot of precision, execution ability, and robustness are better than expected.