 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExpand Your SCOPE: Semantic Cognition over Potential-Based Exploration for Embodied Visual Navigation
Nov 12, 2025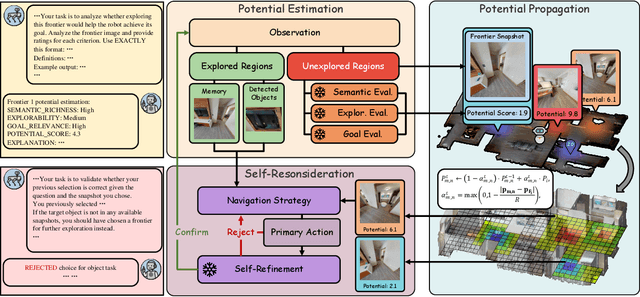
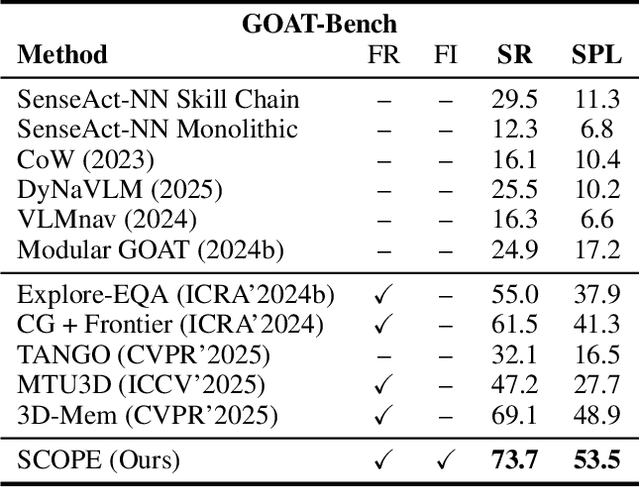
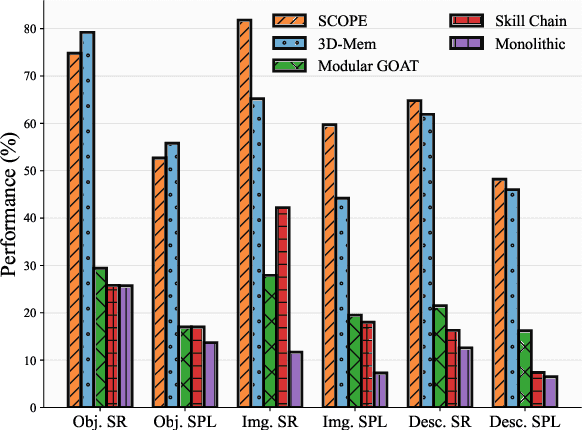
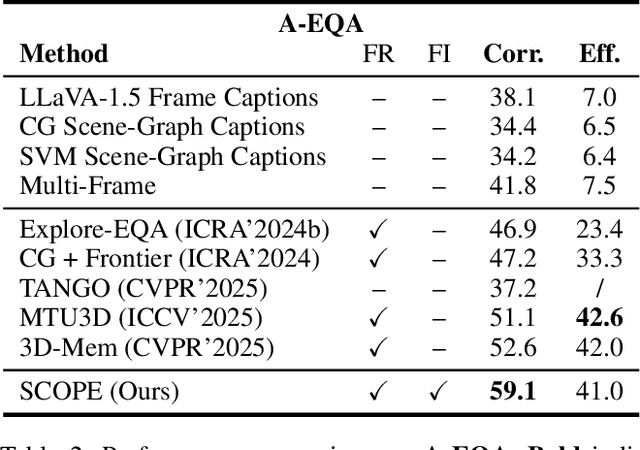
Embodied visual navigation remains a challenging task, as agents must explore unknown environments with limited knowledge. Existing zero-shot studies have shown that incorporating memory mechanisms to support goal-directed behavior can improve long-horizon planning performance. However, they overlook visual frontier boundaries, which fundamentally dictate future trajectories and observations, and fall short of inferring the relationship between partial visual observations and navigation goals. In this paper, we propose Semantic Cognition Over Potential-based Exploration (SCOPE), a zero-shot framework that explicitly leverages frontier information to drive potential-based exploration, enabling more informed and goal-relevant decisions. SCOPE estimates exploration potential with a Vision-Language Model and organizes it into a spatio-temporal potential graph, capturing boundary dynamics to support long-horizon planning. In addition, SCOPE incorporates a self-reconsideration mechanism that revisits and refines prior decisions, enhancing reliability and reducing overconfident errors. Experimental results on two diverse embodied navigation tasks show that SCOPE outperforms state-of-the-art baselines by 4.6\% in accuracy. Further analysis demonstrates that its core components lead to improved calibration, stronger generalization, and higher decision quality.
S2TNet: Spatio-Temporal Transformer Networks for Trajectory Prediction in Autonomous Driving
Jun 22, 2022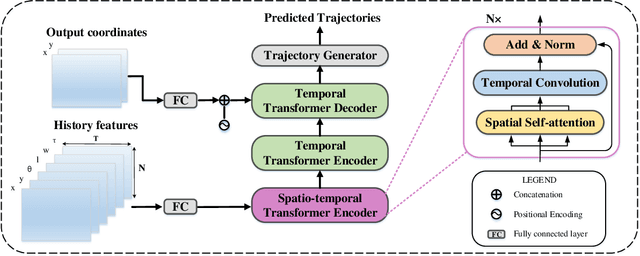
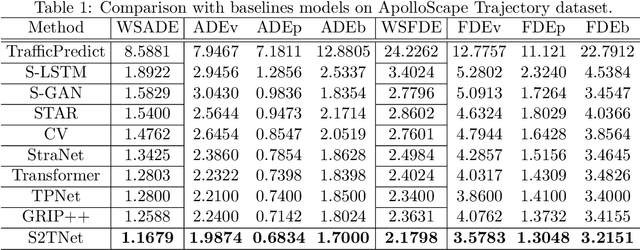
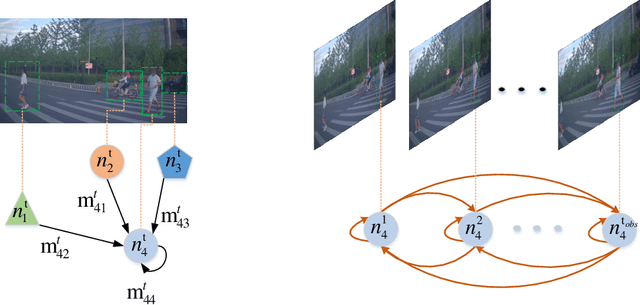
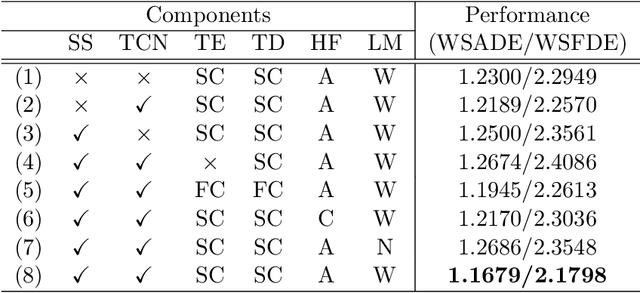
To safely and rationally participate in dense and heterogeneous traffic, autonomous vehicles require to sufficiently analyze the motion patterns of surrounding traffic-agents and accurately predict their future trajectories. This is challenging because the trajectories of traffic-agents are not only influenced by the traffic-agents themselves but also by spatial interaction with each other. Previous methods usually rely on the sequential step-by-step processing of Long Short-Term Memory networks (LSTMs) and merely extract the interactions between spatial neighbors for single type traffic-agents. We propose the Spatio-Temporal Transformer Networks (S2TNet), which models the spatio-temporal interactions by spatio-temporal Transformer and deals with the temporel sequences by temporal Transformer. We input additional category, shape and heading information into our networks to handle the heterogeneity of traffic-agents. The proposed methods outperforms state-of-the-art methods on ApolloScape Trajectory dataset by more than 7\% on both the weighted sum of Average and Final Displacement Error. Our code is available at https://github.com/chenghuang66/s2tnet.