 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRaw High-Definition Radar for Multi-Task Learning
Dec 20, 2021
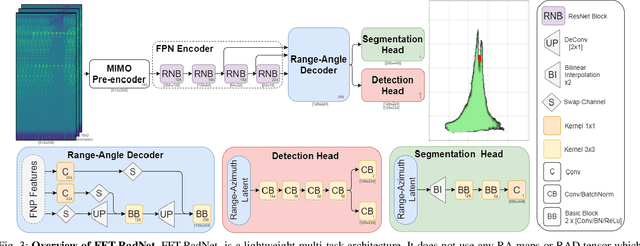
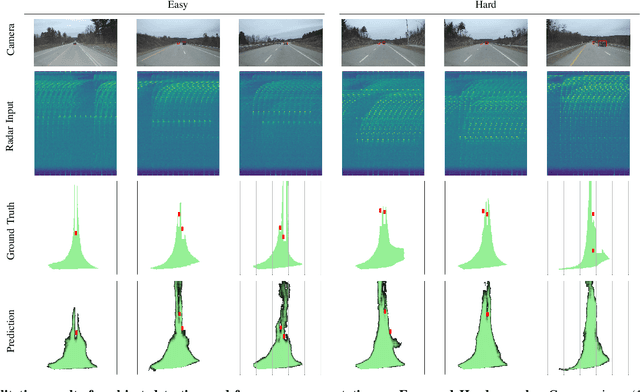
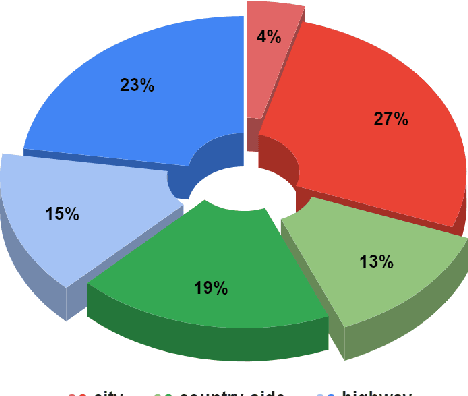
With their robustness to adverse weather conditions and ability to measure speeds, radar sensors have been part of the automotive landscape for more than two decades. Recent progress toward High Definition (HD) Imaging radar has driven the angular resolution below the degree, thus approaching laser scanning performance. However, the amount of data a HD radar delivers and the computational cost to estimate the angular positions remain a challenge. In this paper, we propose a novel HD radar sensing model, FFT-RadNet, that eliminates the overhead of computing the Range-Azimuth-Doppler 3D tensor, learning instead to recover angles from a Range-Doppler spectrum. FFT-RadNet is trained both to detect vehicles and to segment free driving space. On both tasks, it competes with the most recent radar-based models while requiring less compute and memory. Also, we collected and annotated 2-hour worth of raw data from synchronized automotive-grade sensors (camera, laser, HD radar) in various environments (city street, highway, countryside road). This unique dataset, nick-named RADIal for "Radar, Lidar et al.", is available at https://github.com/valeoai/RADIal.
PolarNet: Accelerated Deep Open Space Segmentation Using Automotive Radar in Polar Domain
Mar 04, 2021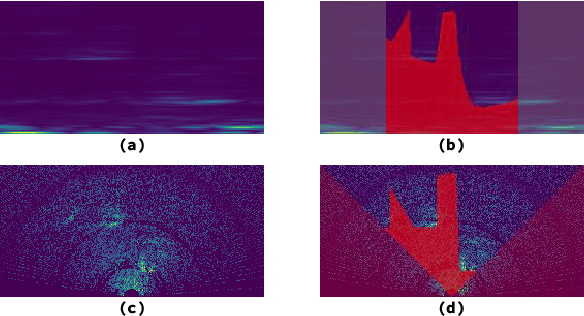
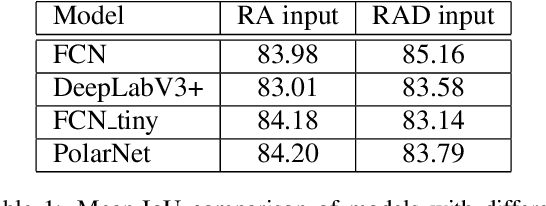
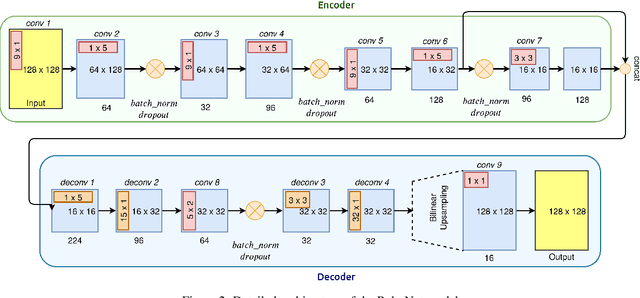
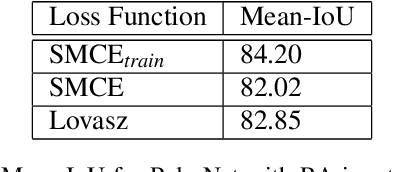
Camera and Lidar processing have been revolutionized with the rapid development of deep learning model architectures. Automotive radar is one of the crucial elements of automated driver assistance and autonomous driving systems. Radar still relies on traditional signal processing techniques, unlike camera and Lidar based methods. We believe this is the missing link to achieve the most robust perception system. Identifying drivable space and occupied space is the first step in any autonomous decision making task. Occupancy grid map representation of the environment is often used for this purpose. In this paper, we propose PolarNet, a deep neural model to process radar information in polar domain for open space segmentation. We explore various input-output representations. Our experiments show that PolarNet is a effective way to process radar data that achieves state-of-the-art performance and processing speeds while maintaining a compact size.
Deep Open Space Segmentation using Automotive Radar
Mar 18, 2020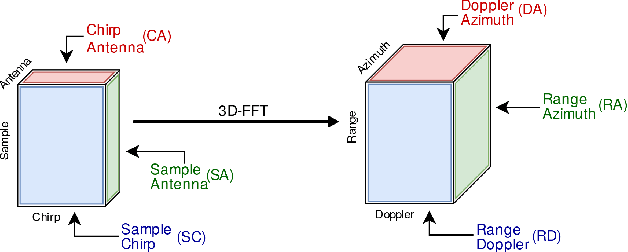
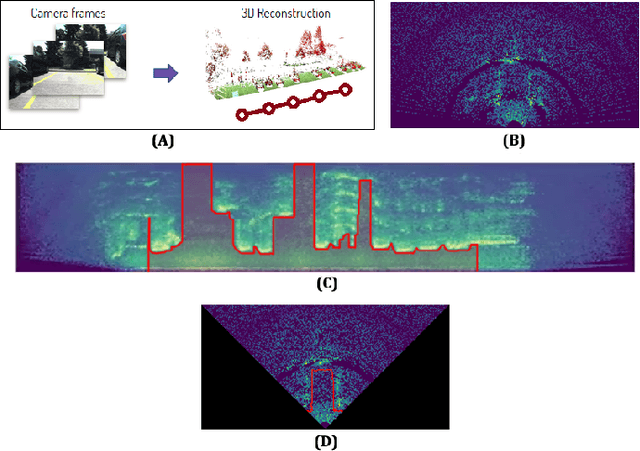
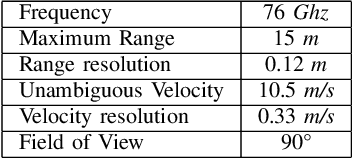
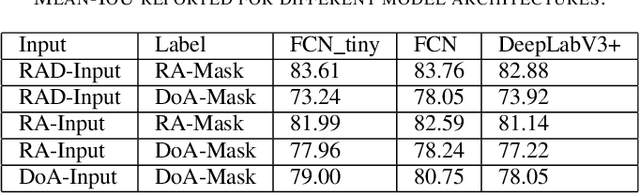
In this work, we propose the use of radar with advanced deep segmentation models to identify open space in parking scenarios. A publically available dataset of radar observations called SCORP was collected. Deep models are evaluated with various radar input representations. Our proposed approach achieves low memory usage and real-time processing speeds, and is thus very well suited for embedded deployment.