 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolarNet: Accelerated Deep Open Space Segmentation Using Automotive Radar in Polar Domain
Paper and Code
Mar 04, 2021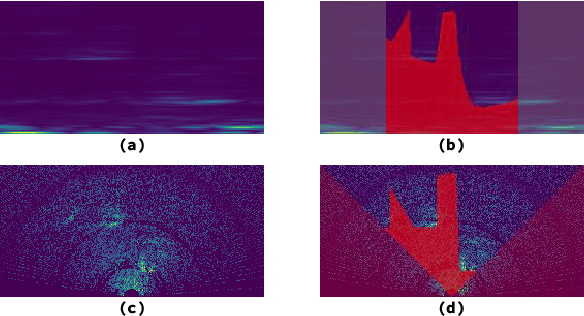
Camera and Lidar processing have been revolutionized with the rapid development of deep learning model architectures. Automotive radar is one of the crucial elements of automated driver assistance and autonomous driving systems. Radar still relies on traditional signal processing techniques, unlike camera and Lidar based methods. We believe this is the missing link to achieve the most robust perception system. Identifying drivable space and occupied space is the first step in any autonomous decision making task. Occupancy grid map representation of the environment is often used for this purpose. In this paper, we propose PolarNet, a deep neural model to process radar information in polar domain for open space segmentation. We explore various input-output representations. Our experiments show that PolarNet is a effective way to process radar data that achieves state-of-the-art performance and processing speeds while maintaining a compact size.