 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel MLLM-based Approach for Autonomous Driving in Different Weather Conditions
Nov 15, 2024Autonomous driving (AD) technology promises to revolutionize daily transportation by making it safer, more efficient, and more comfortable. Their role in reducing traffic accidents and improving mobility will be vital to the future of intelligent transportation systems. Autonomous driving in harsh environmental conditions presents significant challenges that demand robust and adaptive solutions and require more investigation. In this context, we present in this paper a comprehensive performance analysis of an autonomous driving agent leveraging the capabilities of a Multi-modal Large Language Model (MLLM) using GPT-4o within the LimSim++ framework that offers close loop interaction with the CARLA driving simulator. We call it MLLM-AD-4o. Our study evaluates the agent's decision-making, perception, and control under adverse conditions, including bad weather, poor visibility, and complex traffic scenarios. Our results demonstrate the AD agent's ability to maintain high levels of safety and efficiency, even in challenging environments, underscoring the potential of GPT-4o to enhance autonomous driving systems (ADS) in any environment condition. Moreover, we evaluate the performance of MLLM-AD-4o when different perception entities are used including either front cameras only, front and rear cameras, and when combined with LiDAR. The results of this work provide valuable insights into integrating MLLMs with AD frameworks, paving the way for future advancements in this field.
OCD-FL: A Novel Communication-Efficient Peer Selection-based Decentralized Federated Learning
Mar 06, 2024


The conjunction of edge intelligence and the ever-growing Internet-of-Things (IoT) network heralds a new era of collaborative machine learning, with federated learning (FL) emerging as the most prominent paradigm. With the growing interest in these learning schemes, researchers started addressing some of their most fundamental limitations. Indeed, conventional FL with a central aggregator presents a single point of failure and a network bottleneck. To bypass this issue, decentralized FL where nodes collaborate in a peer-to-peer network has been proposed. Despite the latter's efficiency, communication costs and data heterogeneity remain key challenges in decentralized FL. In this context, we propose a novel scheme, called opportunistic communication-efficient decentralized federated learning, a.k.a., OCD-FL, consisting of a systematic FL peer selection for collaboration, aiming to achieve maximum FL knowledge gain while reducing energy consumption. Experimental results demonstrate the capability of OCD-FL to achieve similar or better performances than the fully collaborative FL, while significantly reducing consumed energy by at least 30% and up to 80%.
Towards Reliable Participation in UAV-Enabled Federated Edge Learning on Non-IID Data
Dec 16, 2023Federated Learning (FL) is a decentralized machine learning (ML) technique that allows a number of participants to train an ML model collaboratively without having to share their private local datasets with others. When participants are unmanned aerial vehicles (UAVs), UAV-enabled FL would experience heterogeneity due to the majorly skewed (non-independent and identically distributed -IID) collected data. In addition, UAVs may demonstrate unintentional misbehavior in which the latter may fail to send updates to the FL server due, for instance, to UAVs' disconnectivity from the FL system caused by high mobility, unavailability, or battery depletion. Such challenges may significantly affect the convergence of the FL model. A recent way to tackle these challenges is client selection, based on customized criteria that consider UAV computing power and energy consumption. However, most existing client selection schemes neglected the participants' reliability. Indeed, FL can be targeted by poisoning attacks, in which malicious UAVs upload poisonous local models to the FL server, by either providing targeted false predictions for specifically chosen inputs or by compromising the global model's accuracy through tampering with the local model. Hence, we propose in this paper a novel client selection scheme that enhances convergence by prioritizing fast UAVs with high-reliability scores, while eliminating malicious UAVs from training. Through experiments, we assess the effectiveness of our scheme in resisting different attack scenarios, in terms of convergence and achieved model accuracy. Finally, we demonstrate the performance superiority of the proposed approach compared to baseline methods.
RL-Based Cargo-UAV Trajectory Planning and Cell Association for Minimum Handoffs, Disconnectivity, and Energy Consumption
Dec 05, 2023



Unmanned aerial vehicle (UAV) is a promising technology for last-mile cargo delivery. However, the limited on-board battery capacity, cellular unreliability, and frequent handoffs in the airspace are the main obstacles to unleash its full potential. Given that existing cellular networks were primarily designed to service ground users, re-utilizing the same architecture for highly mobile aerial users, e.g., cargo-UAVs, is deemed challenging. Indeed, to ensure a safe delivery using cargo-UAVs, it is crucial to utilize the available energy efficiently, while guaranteeing reliable connectivity for command-and-control and avoiding frequent handoff. To achieve this goal, we propose a novel approach for joint cargo-UAV trajectory planning and cell association. Specifically, we formulate the cargo-UAV mission as a multi-objective problem aiming to 1) minimize energy consumption, 2) reduce handoff events, and 3) guarantee cellular reliability along the trajectory. We leverage reinforcement learning (RL) to jointly optimize the cargo-UAV's trajectory and cell association. Simulation results demonstrate a performance improvement of our proposed method, in terms of handoffs, disconnectivity, and energy consumption, compared to benchmarks.
Data-Efficient Energy-Aware Participant Selection for UAV-Enabled Federated Learning
Aug 14, 2023Unmanned aerial vehicle (UAV)-enabled edge federated learning (FL) has sparked a rise in research interest as a result of the massive and heterogeneous data collected by UAVs, as well as the privacy concerns related to UAV data transmissions to edge servers. However, due to the redundancy of UAV collected data, e.g., imaging data, and non-rigorous FL participant selection, the convergence time of the FL learning process and bias of the FL model may increase. Consequently, we investigate in this paper the problem of selecting UAV participants for edge FL, aiming to improve the FL model's accuracy, under UAV constraints of energy consumption, communication quality, and local datasets' heterogeneity. We propose a novel UAV participant selection scheme, called data-efficient energy-aware participant selection strategy (DEEPS), which consists of selecting the best FL participant in each sub-region based on the structural similarity index measure (SSIM) average score of its local dataset and its power consumption profile. Through experiments, we demonstrate that the proposed selection scheme is superior to the benchmark random selection method, in terms of model accuracy, training time, and UAV energy consumption.
Multi-UAV Speed Control with Collision Avoidance and Handover-aware Cell Association: DRL with Action Branching
Jul 24, 2023



This paper presents a deep reinforcement learning solution for optimizing multi-UAV cell-association decisions and their moving velocity on a 3D aerial highway. The objective is to enhance transportation and communication performance, including collision avoidance, connectivity, and handovers. The problem is formulated as a Markov decision process (MDP) with UAVs' states defined by velocities and communication data rates. We propose a neural architecture with a shared decision module and multiple network branches, each dedicated to a specific action dimension in a 2D transportation-communication space. This design efficiently handles the multi-dimensional action space, allowing independence for individual action dimensions. We introduce two models, Branching Dueling Q-Network (BDQ) and Branching Dueling Double Deep Q-Network (Dueling DDQN), to demonstrate the approach. Simulation results show a significant improvement of 18.32% compared to existing benchmarks.
FLSTRA: Federated Learning in Stratosphere
Feb 01, 2023We propose a federated learning (FL) in stratosphere (FLSTRA) system, where a high altitude platform station (HAPS) felicitates a large number of terrestrial clients to collaboratively learn a global model without sharing the training data. FLSTRA overcomes the challenges faced by FL in terrestrial networks, such as slow convergence and high communication delay due to limited client participation and multi-hop communications. HAPS leverages its altitude and size to allow the participation of more clients with line-of-sight (LoS) links and the placement of a powerful server. However, handling many clients at once introduces computing and transmission delays. Thus, we aim to obtain a delay-accuracy trade-off for FLSTRA. Specifically, we first develop a joint client selection and resource allocation algorithm for uplink and downlink to minimize the FL delay subject to the energy and quality-of-service (QoS) constraints. Second, we propose a communication and computation resource-aware (CCRA-FL) algorithm to achieve the target FL accuracy while deriving an upper bound for its convergence rate. The formulated problem is non-convex; thus, we propose an iterative algorithm to solve it. Simulation results demonstrate the effectiveness of the proposed FLSTRA system, compared to terrestrial benchmarks, in terms of FL delay and accuracy.
On the Design of Communication-Efficient Federated Learning for Health Monitoring
Nov 30, 2022



With the booming deployment of Internet of Things, health monitoring applications have gradually prospered. Within the recent COVID-19 pandemic situation, interest in permanent remote health monitoring solutions has raised, targeting to reduce contact and preserve the limited medical resources. Among the technological methods to realize efficient remote health monitoring, federated learning (FL) has drawn particular attention due to its robustness in preserving data privacy. However, FL can yield to high communication costs, due to frequent transmissions between the FL server and clients. To tackle this problem, we propose in this paper a communication-efficient federated learning (CEFL) framework that involves clients clustering and transfer learning. First, we propose to group clients through the calculation of similarity factors, based on the neural networks characteristics. Then, a representative client in each cluster is selected to be the leader of the cluster. Differently from the conventional FL, our method performs FL training only among the cluster leaders. Subsequently, transfer learning is adopted by the leader to update its cluster members with the trained FL model. Finally, each member fine-tunes the received model with its own data. To further reduce the communication costs, we opt for a partial-layer FL aggregation approach. This method suggests partially updating the neural network model rather than fully. Through experiments, we show that CEFL can save up to to 98.45% in communication costs while conceding less than 3% in accuracy loss, when compared to the conventional FL. Finally, CEFL demonstrates a high accuracy for clients with small or unbalanced datasets.
UAV-based Crowd Surveillance in Post COVID-19 Era
Nov 28, 2021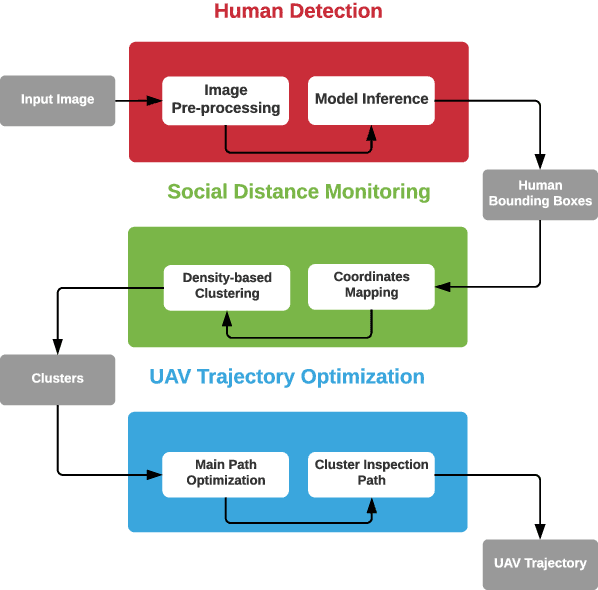
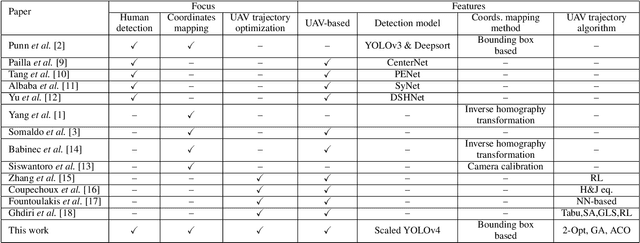
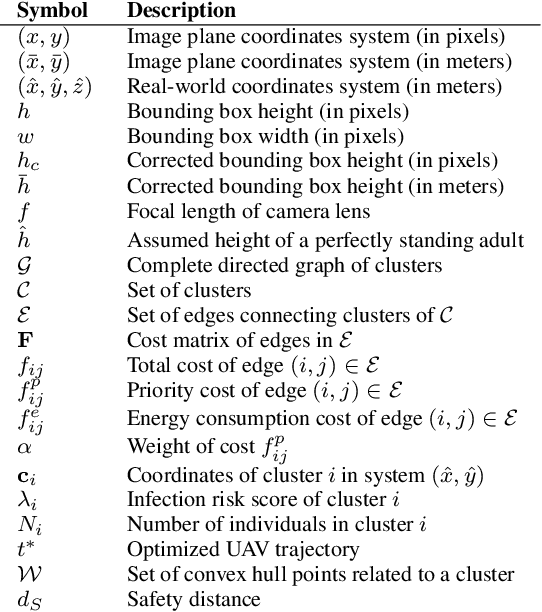
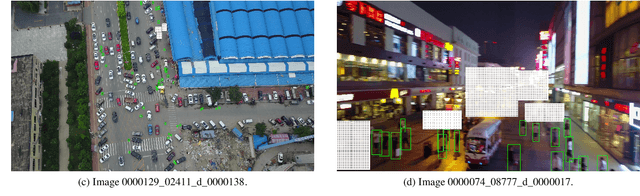
To cope with the current pandemic situation and reinstate pseudo-normal daily life, several measures have been deployed and maintained, such as mask wearing, social distancing, hands sanitizing, etc. Since outdoor cultural events, concerts, and picnics, are gradually allowed, a close monitoring of the crowd activity is needed to avoid undesired contact and disease transmission. In this context, intelligent unmanned aerial vehicles (UAVs) can be occasionally deployed to ensure the surveillance of these activities, that health restriction measures are applied, and to trigger alerts when the latter are not respected. Consequently, we propose in this paper a complete UAV framework for intelligent monitoring of post COVID-19 outdoor activities. Specifically, we propose a three steps approach. In the first step, captured images by a UAV are analyzed using machine learning to detect and locate individuals. The second step consists of a novel coordinates mapping approach to evaluate distances among individuals, then cluster them, while the third step provides an energy-efficient and/or reliable UAV trajectory to inspect clusters for restrictions violation such as mask wearing. Obtained results provide the following insights: 1) Efficient detection of individuals depends on the angle from which the image was captured, 2) coordinates mapping is very sensitive to the estimation error in individuals' bounding boxes, and 3) UAV trajectory design algorithm 2-Opt is recommended for practical real-time deployments due to its low-complexity and near-optimal performance.
Optimization of Quantized Phase Shifts for Reconfigurable Smart Surfaces Assisted Communications
Nov 22, 2021



Reconfigurable Smart Surface (RSS) is assumed to be a key enabler for future wireless communication systems due to its ability to control the wireless propagation environment and, thus, enhance communications quality. Although optimal and continuous phase-shift configuration can be analytically obtained, practical RSS systems are prone to both channel estimation errors, discrete control, and curse of dimensionality. This leads to relaying on a finite number of phase-shift configurations that is expected to degrade the system's performances. In this paper, we tackle the problem of quantized RSS phase-shift configuration, aiming to maximize the data rate of an orthogonal frequency division multiplexing (OFDM) point-to-point RSS-assisted communication. Due to the complexity of optimally solving the formulated problem, we propose here a sub-optimal greedy algorithm to solve it. Simulation results illustrate the performance superiority of the proposed algorithm compared to baseline approaches. Finally, the impact of several parameters ,e.g., quantization resolution and RSS placement, is investigated.