 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOCD-FL: A Novel Communication-Efficient Peer Selection-based Decentralized Federated Learning
Mar 06, 2024


The conjunction of edge intelligence and the ever-growing Internet-of-Things (IoT) network heralds a new era of collaborative machine learning, with federated learning (FL) emerging as the most prominent paradigm. With the growing interest in these learning schemes, researchers started addressing some of their most fundamental limitations. Indeed, conventional FL with a central aggregator presents a single point of failure and a network bottleneck. To bypass this issue, decentralized FL where nodes collaborate in a peer-to-peer network has been proposed. Despite the latter's efficiency, communication costs and data heterogeneity remain key challenges in decentralized FL. In this context, we propose a novel scheme, called opportunistic communication-efficient decentralized federated learning, a.k.a., OCD-FL, consisting of a systematic FL peer selection for collaboration, aiming to achieve maximum FL knowledge gain while reducing energy consumption. Experimental results demonstrate the capability of OCD-FL to achieve similar or better performances than the fully collaborative FL, while significantly reducing consumed energy by at least 30% and up to 80%.
UAV-based Crowd Surveillance in Post COVID-19 Era
Nov 28, 2021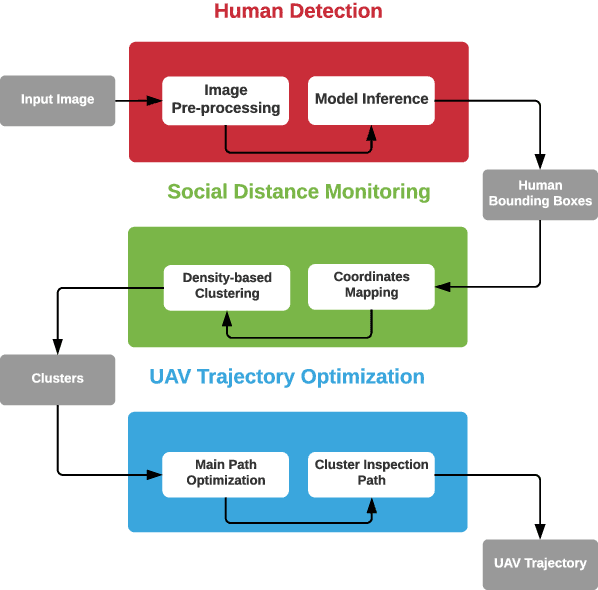
To cope with the current pandemic situation and reinstate pseudo-normal daily life, several measures have been deployed and maintained, such as mask wearing, social distancing, hands sanitizing, etc. Since outdoor cultural events, concerts, and picnics, are gradually allowed, a close monitoring of the crowd activity is needed to avoid undesired contact and disease transmission. In this context, intelligent unmanned aerial vehicles (UAVs) can be occasionally deployed to ensure the surveillance of these activities, that health restriction measures are applied, and to trigger alerts when the latter are not respected. Consequently, we propose in this paper a complete UAV framework for intelligent monitoring of post COVID-19 outdoor activities. Specifically, we propose a three steps approach. In the first step, captured images by a UAV are analyzed using machine learning to detect and locate individuals. The second step consists of a novel coordinates mapping approach to evaluate distances among individuals, then cluster them, while the third step provides an energy-efficient and/or reliable UAV trajectory to inspect clusters for restrictions violation such as mask wearing. Obtained results provide the following insights: 1) Efficient detection of individuals depends on the angle from which the image was captured, 2) coordinates mapping is very sensitive to the estimation error in individuals' bounding boxes, and 3) UAV trajectory design algorithm 2-Opt is recommended for practical real-time deployments due to its low-complexity and near-optimal performance.