 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCADFS: A Big CAD Program Dataset and Framework for Computer-Aided Design with Large Language Models
May 03, 2026We introduce CADFS, a data-centric framework that enables large vision-language models to generate complex CAD design histories. Existing generative CAD systems are restricted to sketch-extrude operations due to simplified representations and limited datasets. We address this by introducing a FeatureScript-based representation and constructing a dataset of 450k real-world CAD models spanning 15 modeling operations. We obtain the dataset via a new pipeline that reconstructs clean, executable FeatureScript programs and provides multimodal annotations. Fine-tuning a VLM on this representation yields state-of-the-art results in text-conditioned CAD generation and image-based reconstruction, producing more accurate, diverse, and feature-rich designs than prior frameworks. Ablations show that each individual component of our framework, i.e., the FeatureScript representation, the extended operation set, and representation-aligned textual descriptions, significantly improves performance. Our framework substantially broadens the complexity and realism achievable in generative CAD. The CADFS framework and the new dataset are available at https://voyleg.github.io/cadfs/.
Robust Two-View Geometry Estimation with Implicit Differentiation
Oct 23, 2024We present a novel two-view geometry estimation framework which is based on a differentiable robust loss function fitting. We propose to treat the robust fundamental matrix estimation as an implicit layer, which allows us to avoid backpropagation through time and significantly improves the numerical stability. To take full advantage of the information from the feature matching stage we incorporate learnable weights that depend on the matching confidences. In this way our solution brings together feature extraction, matching and two-view geometry estimation in a unified end-to-end trainable pipeline. We evaluate our approach on the camera pose estimation task in both outdoor and indoor scenarios. The experiments on several datasets show that the proposed method outperforms both classic and learning-based state-of-the-art methods by a large margin. The project webpage is available at: https://github.com/VladPyatov/ihls
GSLoc: Visual Localization with 3D Gaussian Splatting
Oct 08, 2024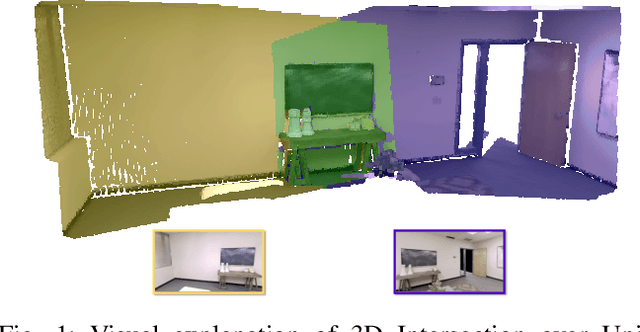
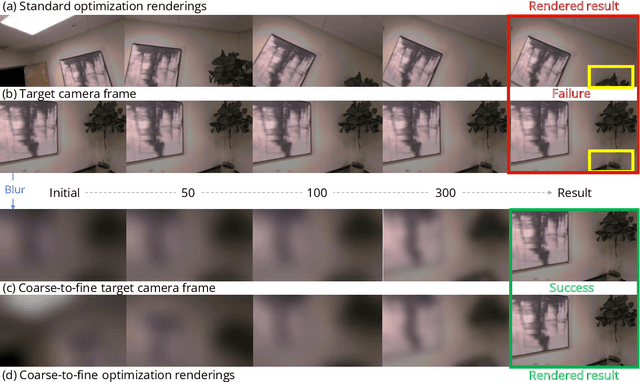
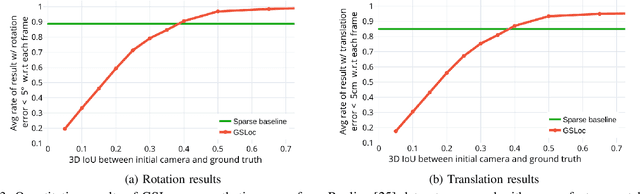
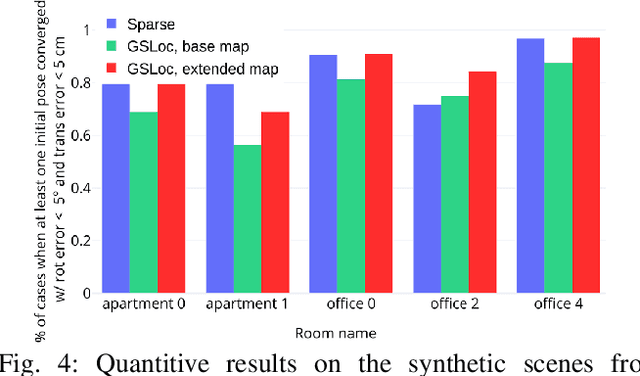
We present GSLoc: a new visual localization method that performs dense camera alignment using 3D Gaussian Splatting as a map representation of the scene. GSLoc backpropagates pose gradients over the rendering pipeline to align the rendered and target images, while it adopts a coarse-to-fine strategy by utilizing blurring kernels to mitigate the non-convexity of the problem and improve the convergence. The results show that our approach succeeds at visual localization in challenging conditions of relatively small overlap between initial and target frames inside textureless environments when state-of-the-art neural sparse methods provide inferior results. Using the byproduct of realistic rendering from the 3DGS map representation, we show how to enhance localization results by mixing a set of observed and virtual reference keyframes when solving the image retrieval problem. We evaluate our method both on synthetic and real-world data, discussing its advantages and application potential.