 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGSLoc: Visual Localization with 3D Gaussian Splatting
Paper and Code
Oct 08, 2024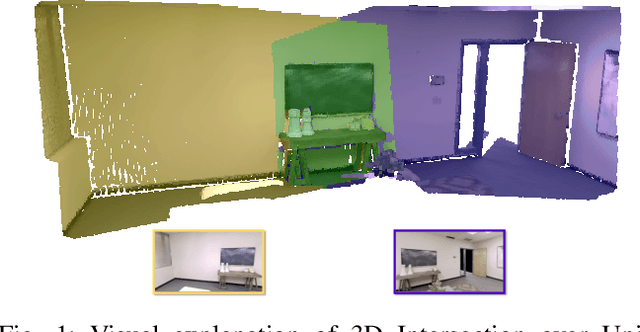
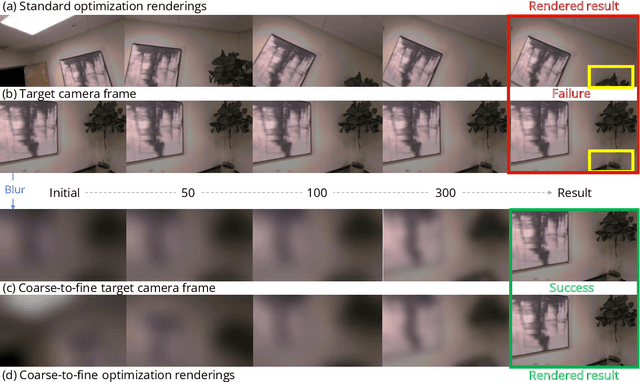
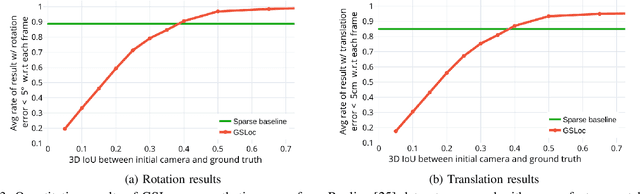
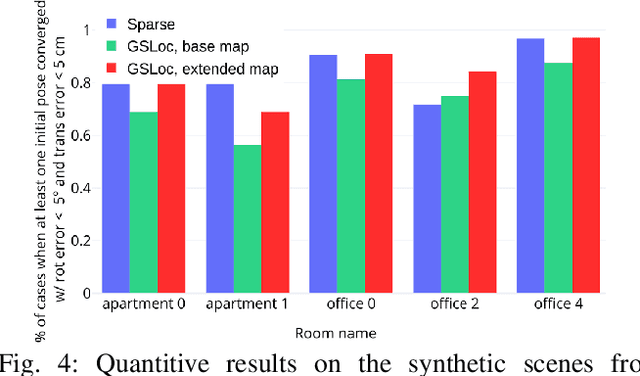
We present GSLoc: a new visual localization method that performs dense camera alignment using 3D Gaussian Splatting as a map representation of the scene. GSLoc backpropagates pose gradients over the rendering pipeline to align the rendered and target images, while it adopts a coarse-to-fine strategy by utilizing blurring kernels to mitigate the non-convexity of the problem and improve the convergence. The results show that our approach succeeds at visual localization in challenging conditions of relatively small overlap between initial and target frames inside textureless environments when state-of-the-art neural sparse methods provide inferior results. Using the byproduct of realistic rendering from the 3DGS map representation, we show how to enhance localization results by mixing a set of observed and virtual reference keyframes when solving the image retrieval problem. We evaluate our method both on synthetic and real-world data, discussing its advantages and application potential.