 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory Planning for Automated Driving using Target Funnels
Mar 31, 2025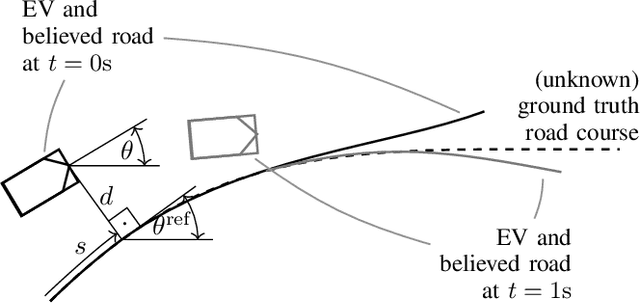
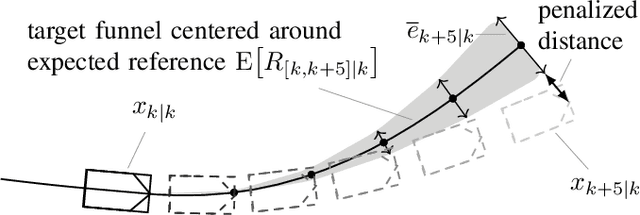
Self-driving vehicles rely on sensory input to monitor their surroundings and continuously adapt to the most likely future road course. Predictive trajectory planning is based on snapshots of the (uncertain) road course as a key input. Under noisy perception data, estimates of the road course can vary significantly, leading to indecisive and erratic steering behavior. To overcome this issue, this paper introduces a predictive trajectory planning algorithm with a novel objective function: instead of targeting a single reference trajectory based on the most likely road course, tracking a series of target reference sets, called a target funnel, is considered. The proposed planning algorithm integrates probabilistic information about the road course, and thus implicitly considers regular updates to road perception. Our solution is assessed in a case study using real driving data collected from a prototype vehicle. The results demonstrate that the algorithm maintains tracking accuracy and substantially reduces undesirable steering commands in the presence of noisy road perception, achieving a 56% reduction in input costs compared to a certainty equivalent formulation.
One Stack, Diverse Vehicles: Checking Safe Portability of Automated Driving Software
Jan 30, 2025



Integrating an automated driving software stack into vehicles with variable configuration is challenging, especially due to different hardware characteristics. Further, to provide software updates to a vehicle fleet in the field, the functional safety of every affected configuration has to be ensured. These additional demands for dependability and the increasing hardware diversity in automated driving make rigorous automatic analysis essential. This paper addresses this challenge by using formal portability checking of adaptive cruise controller code for different vehicle configurations. Given a formal specification of the safe behavior, models of target configurations are derived, which capture relevant effects of sensors, actuators and computing platforms. A corresponding safe set is obtained and used to check if the desired behavior is achievable on all targets. In a case study, portability checking of a traditional and a neural network controller are performed automatically within minutes for each vehicle hardware configuration. The check provides feedback for necessary adaptations of the controllers, thus, allowing rapid integration and testing of software or parameter changes.
Automatic Parameter Tuning of Self-Driving Vehicles
Jun 25, 2024Modern automated driving solutions utilize trajectory planning and control components with numerous parameters that need to be tuned for different driving situations and vehicle types to achieve optimal performance. This paper proposes a method to automatically tune such parameters to resemble expert demonstrations. We utilize a cost function which captures deviations of the closed-loop operation of the controller from the recorded desired driving behavior. Parameter tuning is then accomplished by using local optimization techniques. Three optimization alternatives are compared in a case study, where a trajectory planner is tuned for lane following in a real-world driving scenario. The results suggest that the proposed approach improves manually tuned initial parameters significantly even with respect to noisy demonstration data.
Optimizing Energy-Efficient Braking Trajectories with Anticipatory Road Data for Automated Vehicles
Jun 25, 2024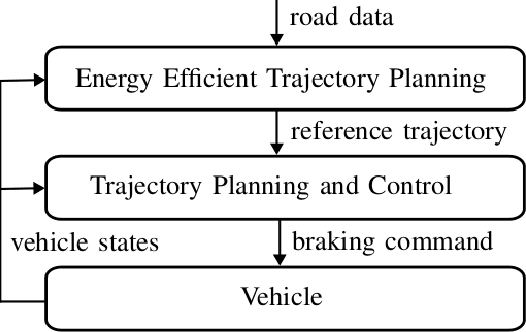
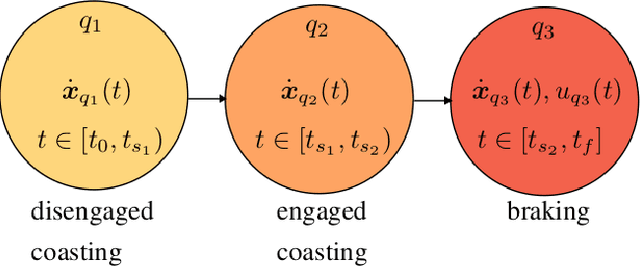
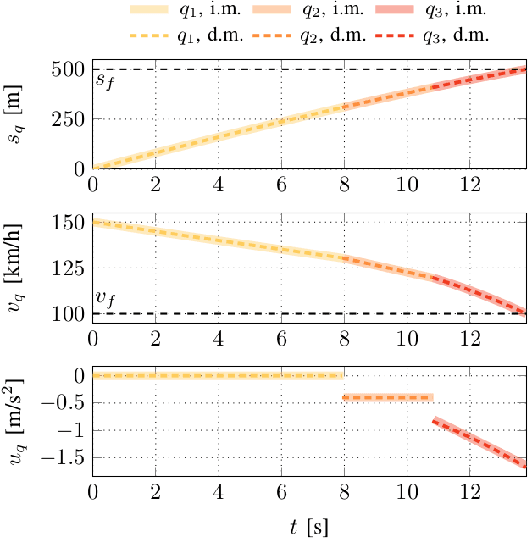
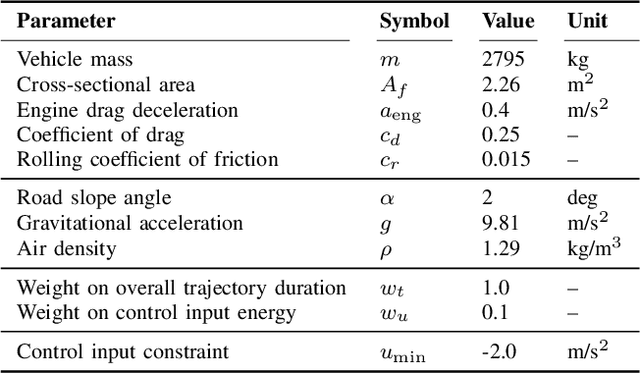
Trajectory planning in automated driving typically focuses on satisfying safety and comfort requirements within the vehicle's onboard sensor range. This paper introduces a method that leverages anticipatory road data, such as speed limits, road slopes, and traffic lights, beyond the local perception range to optimize energy-efficient braking trajectories. For that, coasting, which reduces energy consumption, and active braking are combined to transition from the current vehicle velocity to a lower target velocity at a given distance ahead. Finding the switching instants between the coasting phases and the continuous control for the braking phase is addressed as an optimal trade-off between maximizing coasting periods and minimizing braking effort. The resulting switched optimal control problem is solved by deriving necessary optimality conditions. To facilitate the incorporation of additional feasibility constraints for multi-phase trajectories, a sub-optimal alternative solution based on parametric optimization is proposed. Both methods are compared in simulation.
Learning to falsify automated driving vehicles with prior knowledge
Jan 25, 2021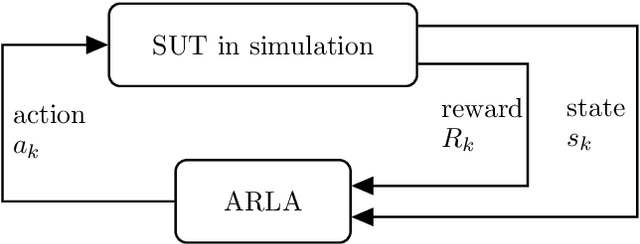
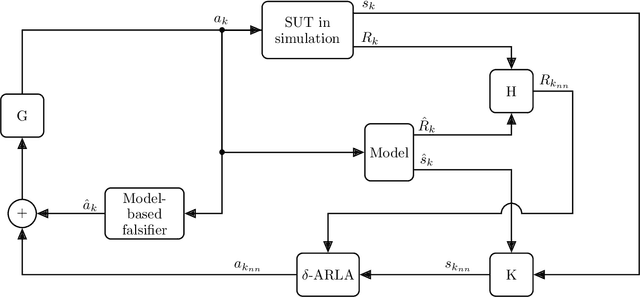
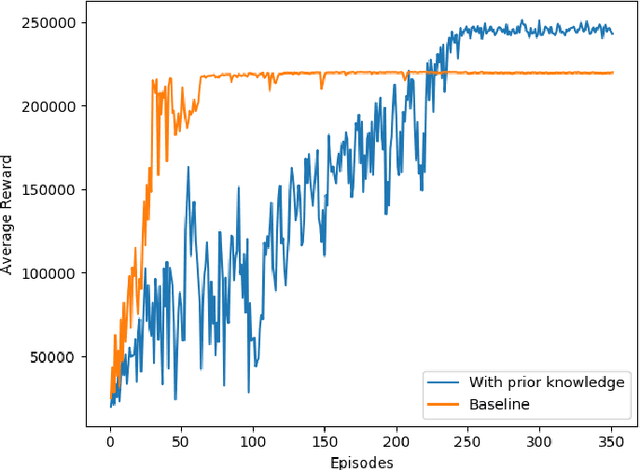
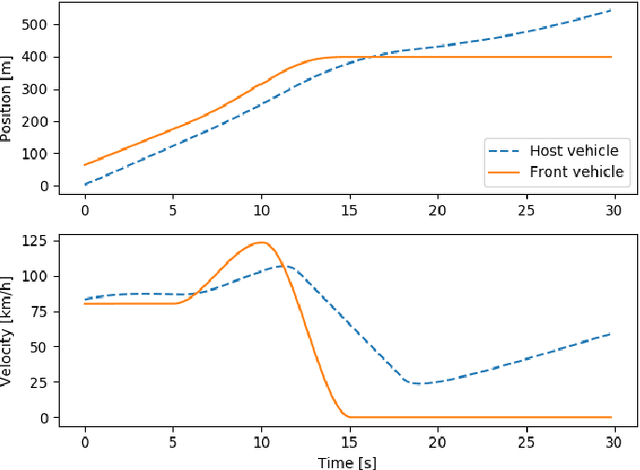
While automated driving technology has achieved a tremendous progress, the scalable and rigorous testing and verification of safe automated and autonomous driving vehicles remain challenging. This paper proposes a learning-based falsification framework for testing the implementation of an automated or self-driving function in simulation. We assume that the function specification is associated with a violation metric on possible scenarios. Prior knowledge is incorporated to limit the scenario parameter variance and in a model-based falsifier to guide and improve the learning process. For an exemplary adaptive cruise controller, the presented framework yields non-trivial falsifying scenarios with higher reward, compared to scenarios obtained by purely learning-based or purely model-based falsification approaches.
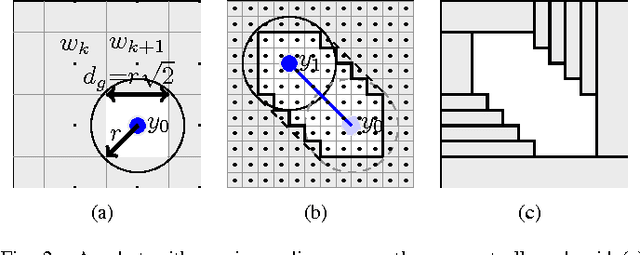
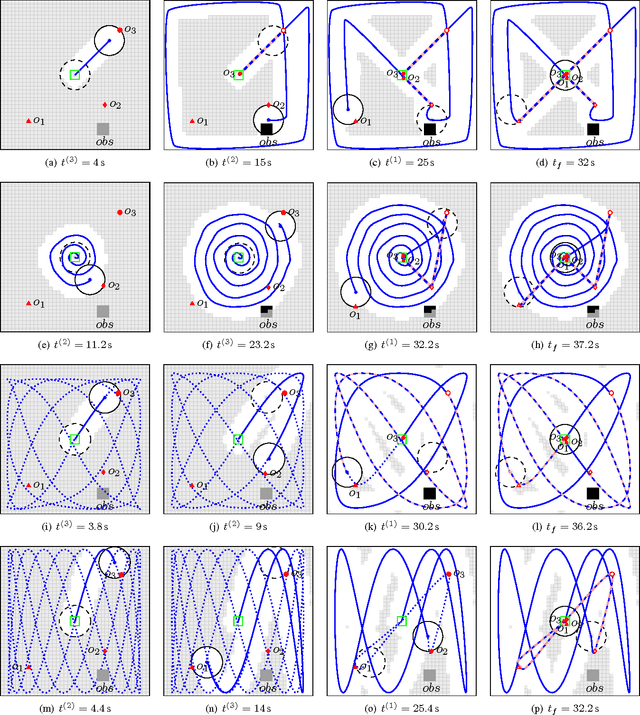
Optimal control for a robotic exploration, pick-up and delivery problem
Jul 05, 2016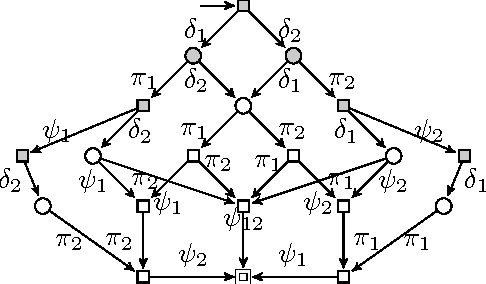

This paper addresses an optimal control problem for a robot that has to find and collect a finite number of objects and move them to a depot in minimum time. The robot has fourth-order dynamics that change instantaneously at any pick-up or drop-off of an object. The objects are modeled by point masses with a-priori unknown locations in a bounded two-dimensional space that may contain unknown obstacles. For this hybrid system, an Optimal Control Problem (OCP) is approximately solved by a receding horizon scheme, where the derived lower bound for the cost-to-go is evaluated for the worst and for a probabilistic case, assuming a uniform distribution of the objects. First, a time-driven approximate solution based on time and position space discretization and mixed integer programming is presented. Due to the high computational cost of this solution, an alternative event-driven approximate approach based on a suitable motion parameterization and gradient-based optimization is proposed. The solutions are compared in a numerical example, suggesting that the latter approach offers a significant computational advantage while yielding similar qualitative results compared to the former. The methods are particularly relevant for various robotic applications like automated cleaning, search and rescue, harvesting or manufacturing.