 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing Energy-Efficient Braking Trajectories with Anticipatory Road Data for Automated Vehicles
Paper and Code
Jun 25, 2024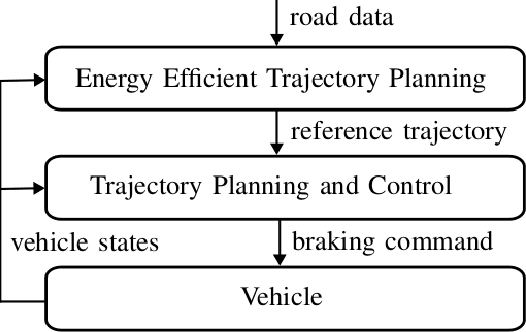
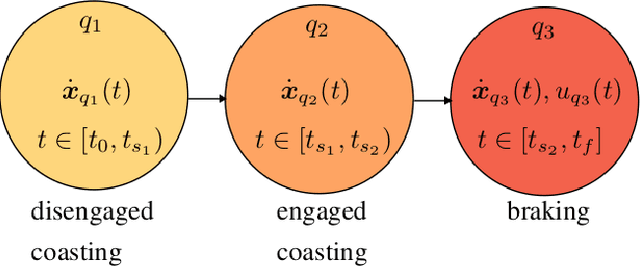
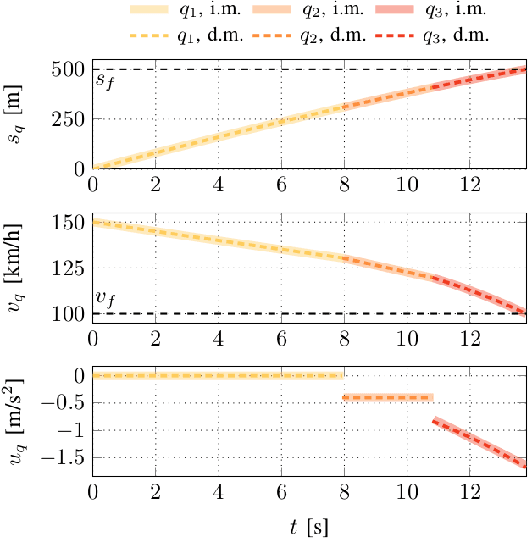
Trajectory planning in automated driving typically focuses on satisfying safety and comfort requirements within the vehicle's onboard sensor range. This paper introduces a method that leverages anticipatory road data, such as speed limits, road slopes, and traffic lights, beyond the local perception range to optimize energy-efficient braking trajectories. For that, coasting, which reduces energy consumption, and active braking are combined to transition from the current vehicle velocity to a lower target velocity at a given distance ahead. Finding the switching instants between the coasting phases and the continuous control for the braking phase is addressed as an optimal trade-off between maximizing coasting periods and minimizing braking effort. The resulting switched optimal control problem is solved by deriving necessary optimality conditions. To facilitate the incorporation of additional feasibility constraints for multi-phase trajectories, a sub-optimal alternative solution based on parametric optimization is proposed. Both methods are compared in simulation.