 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient and Robust Registration on the 3D Special Euclidean Group
Apr 11, 2019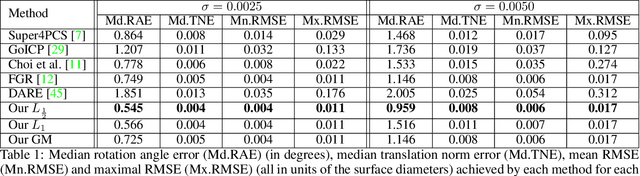
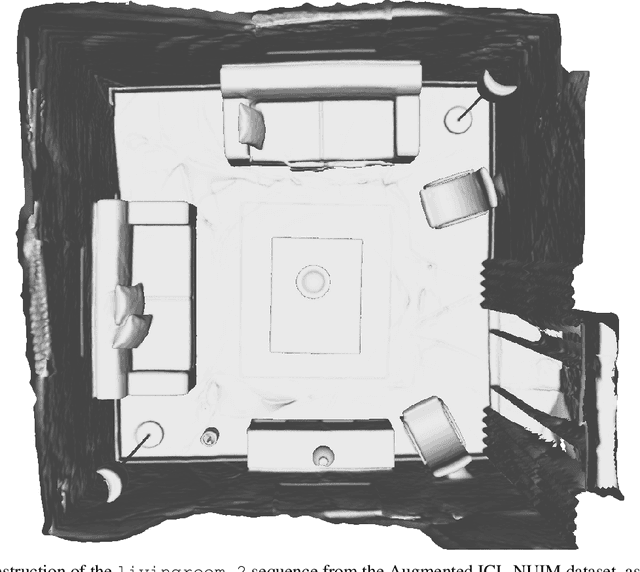

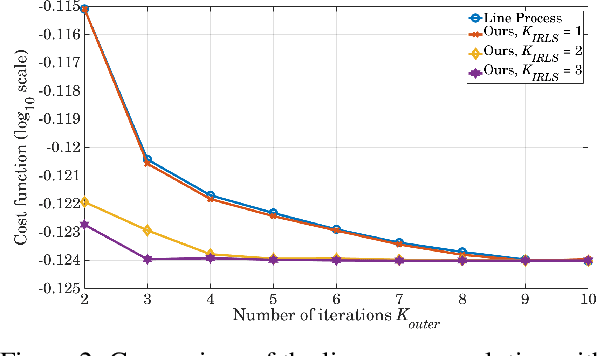
We present an accurate, robust and fast method for registration of 3D scans. Our motion estimation optimizes a robust cost function on the intrinsic representation of rigid motions, i.e., the Special Euclidean group $\mathbb{SE}(3)$. We exploit the geometric properties of Lie groups as well as the robustness afforded by an iteratively reweighted least squares optimization. We also generalize our approach to a joint multiview method that simultaneously solves for the registration of a set of scans. We demonstrate the efficacy of our approach by thorough experimental validation. Our approach significantly outperforms the state-of-the-art robust 3D registration method based on a line process in terms of both speed and accuracy. We also show that this line process method is a special case of our principled geometric solution. Finally, we also present scenarios where global registration based on feature correspondences fails but multiview ICP based on our robust motion estimation is successful.
3DRegNet: A Deep Neural Network for 3D Point Registration
Apr 02, 2019



We present 3DRegNet, a deep learning algorithm for the registration of 3D scans. With the recent emergence of inexpensive 3D commodity sensors, it would be beneficial to develop a learning based 3D registration algorithm. Given a set of 3D point correspondences, we build a deep neural network using deep residual layers and convolutional layers to achieve two tasks: (1) classification of the point correspondences into correct/incorrect ones, and (2) regression of the motion parameters that can align the scans into a common reference frame. 3DRegNet has several advantages over classical methods. First, since 3DRegNet works on point correspondences and not on the original scans, our approach is significantly faster than many conventional approaches. Second, we show that the algorithm can be extended for multi-view scenarios, i.e., simultaneous handling of the registration for more than two scans. In contrast to pose regression networks that employ four variables to represent rotation using quaternions, we use Lie algebra to represent the rotation using only three variables. Extensive experiments on two challenging datasets (i.e. ICL-NUIM and SUN3D) demonstrate that we outperform other methods and achieve state-of-the-art results. The code will be made available.
A Face Fairness Framework for 3D Meshes
Nov 22, 2017
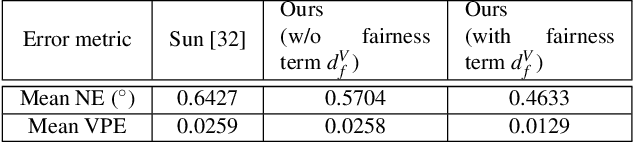
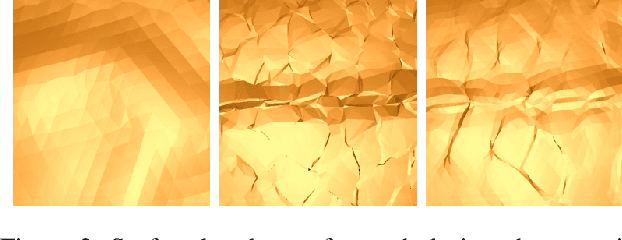
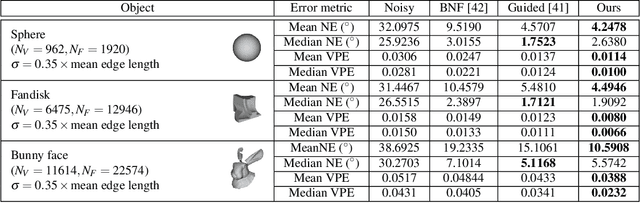
In this paper, we present a face fairness framework for 3D meshes that preserves the regular shape of faces and is applicable to a variety of 3D mesh restoration tasks. Specifically, we present a number of desirable properties for any mesh restoration method and show that our framework satisfies them. We then apply our framework to two different tasks --- mesh-denoising and mesh-refinement, and present comparative results for these two tasks showing improvement over other relevant methods in the literature.
Noise in Structured-Light Stereo Depth Cameras: Modeling and its Applications
May 08, 2015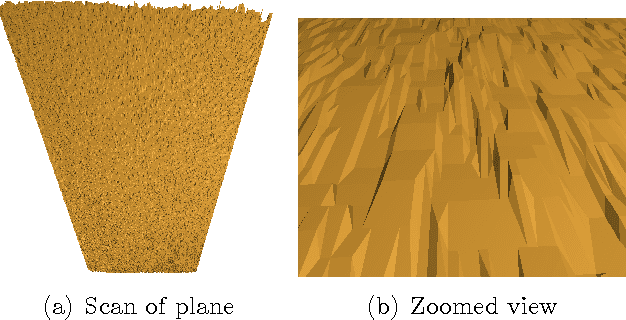
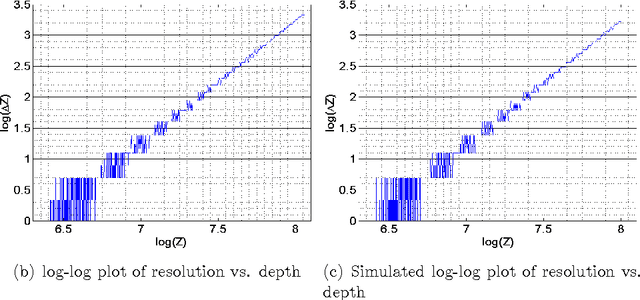
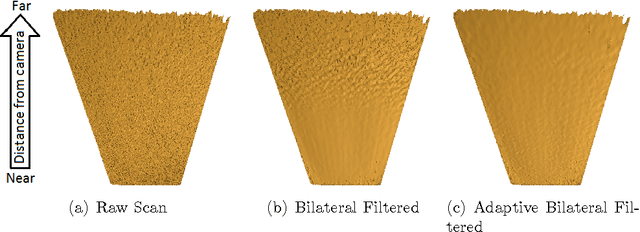

Depth maps obtained from commercially available structured-light stereo based depth cameras, such as the Kinect, are easy to use but are affected by significant amounts of noise. This paper is devoted to a study of the intrinsic noise characteristics of such depth maps, i.e. the standard deviation of noise in estimated depth varies quadratically with the distance of the object from the depth camera. We validate this theoretical model against empirical observations and demonstrate the utility of this noise model in three popular applications: depth map denoising, volumetric scan merging for 3D modeling, and identification of 3D planes in depth maps.