 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient and Robust Registration on the 3D Special Euclidean Group
Paper and Code
Apr 11, 2019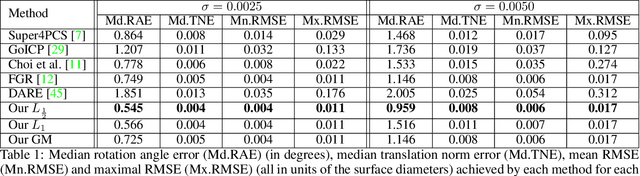

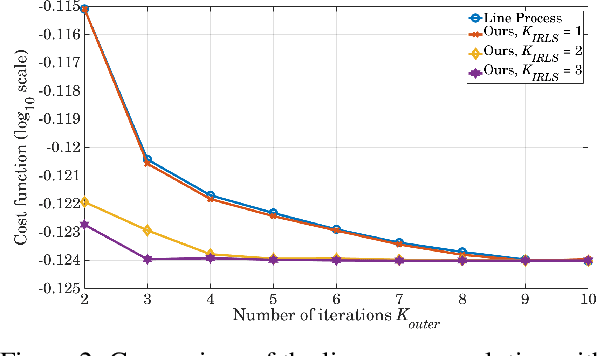
We present an accurate, robust and fast method for registration of 3D scans. Our motion estimation optimizes a robust cost function on the intrinsic representation of rigid motions, i.e., the Special Euclidean group $\mathbb{SE}(3)$. We exploit the geometric properties of Lie groups as well as the robustness afforded by an iteratively reweighted least squares optimization. We also generalize our approach to a joint multiview method that simultaneously solves for the registration of a set of scans. We demonstrate the efficacy of our approach by thorough experimental validation. Our approach significantly outperforms the state-of-the-art robust 3D registration method based on a line process in terms of both speed and accuracy. We also show that this line process method is a special case of our principled geometric solution. Finally, we also present scenarios where global registration based on feature correspondences fails but multiview ICP based on our robust motion estimation is successful.