 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIllusion3D: 3D Multiview Illusion with 2D Diffusion Priors
Dec 12, 2024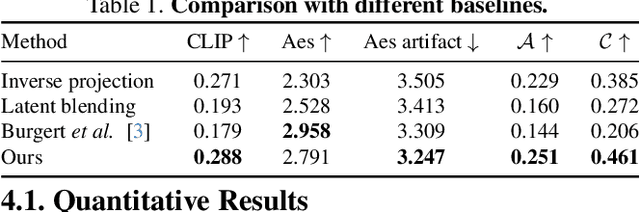

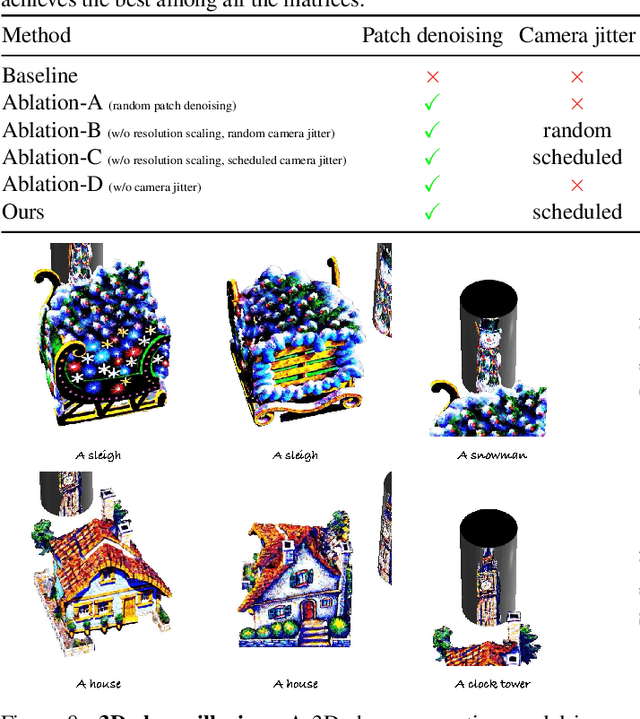
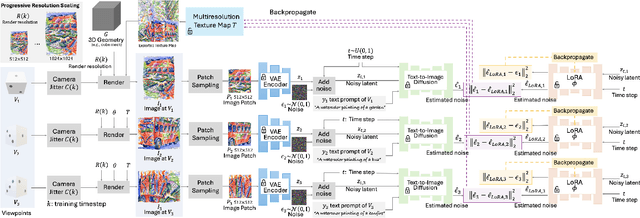
Automatically generating multiview illusions is a compelling challenge, where a single piece of visual content offers distinct interpretations from different viewing perspectives. Traditional methods, such as shadow art and wire art, create interesting 3D illusions but are limited to simple visual outputs (i.e., figure-ground or line drawing), restricting their artistic expressiveness and practical versatility. Recent diffusion-based illusion generation methods can generate more intricate designs but are confined to 2D images. In this work, we present a simple yet effective approach for creating 3D multiview illusions based on user-provided text prompts or images. Our method leverages a pre-trained text-to-image diffusion model to optimize the textures and geometry of neural 3D representations through differentiable rendering. When viewed from multiple angles, this produces different interpretations. We develop several techniques to improve the quality of the generated 3D multiview illusions. We demonstrate the effectiveness of our approach through extensive experiments and showcase illusion generation with diverse 3D forms.
Dynamically Finding Optimal Observer States to Minimize Localization Error with Complex State-Dependent Noise
Nov 30, 2022



We present DyFOS, an active perception method that Dynamically Finds Optimal States to minimize localization error while avoiding obstacles and occlusions. We consider the scenario where a ground target without any exteroceptive sensors must rely on an aerial observer for pose and uncertainty estimates to localize itself along an obstacle-filled path. The observer uses a downward-facing camera to estimate the target's pose and uncertainty. However, the pose uncertainty is a function of the states of the observer, target, and surrounding environment. To find an optimal state that minimizes the target's localization uncertainty, DyFOS uses a localization error prediction pipeline in an optimization search. Given the states mentioned above, the pipeline predicts the target's localization uncertainty with the help of a trained, complex state-dependent sensor measurement model (which is a probabilistic neural network in our case). Our pipeline also predicts target occlusion and obstacle collision to remove undesirable observer states. The output of the optimization search is an optimal observer state that minimizes target localization uncertainty while avoiding occlusion and collision. We evaluate the proposed method using numerical and simulated (Gazebo) experiments. Our results show that DyFOS is almost 100x faster than yet as good as brute force. Furthermore, DyFOS yielded lower localization errors than random and heuristic searches.