 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDomain-Aware Fine-Tuning of Foundation Models
Jul 03, 2024Foundation models (FMs) have revolutionized computer vision, enabling effective learning across different domains. However, their performance under domain shift is yet underexplored. This paper investigates the zero-shot domain adaptation potential of FMs by comparing different backbone architectures and introducing novel domain-aware components that leverage domain related textual embeddings. We propose domain adaptive normalization, termed as Domino, which explicitly leverages domain embeddings during fine-tuning, thus making the model domain aware. Ultimately, Domino enables more robust computer vision models that can adapt effectively to various unseen domains.
Deep EvoGraphNet Architecture For Time-Dependent Brain Graph Data Synthesis From a Single Timepoint
Sep 28, 2020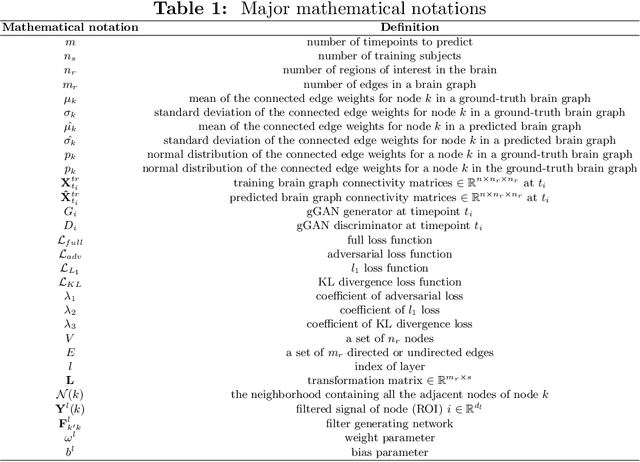

Learning how to predict the brain connectome (i.e. graph) development and aging is of paramount importance for charting the future of within-disorder and cross-disorder landscape of brain dysconnectivity evolution. Indeed, predicting the longitudinal (i.e., time-dependent ) brain dysconnectivity as it emerges and evolves over time from a single timepoint can help design personalized treatments for disordered patients in a very early stage. Despite its significance, evolution models of the brain graph are largely overlooked in the literature. Here, we propose EvoGraphNet, the first end-to-end geometric deep learning-powered graph-generative adversarial network (gGAN) for predicting time-dependent brain graph evolution from a single timepoint. Our EvoGraphNet architecture cascades a set of time-dependent gGANs, where each gGAN communicates its predicted brain graphs at a particular timepoint to train the next gGAN in the cascade at follow-up timepoint. Therefore, we obtain each next predicted timepoint by setting the output of each generator as the input of its successor which enables us to predict a given number of timepoints using only one single timepoint in an end- to-end fashion. At each timepoint, to better align the distribution of the predicted brain graphs with that of the ground-truth graphs, we further integrate an auxiliary Kullback-Leibler divergence loss function. To capture time-dependency between two consecutive observations, we impose an l1 loss to minimize the sparse distance between two serialized brain graphs. A series of benchmarks against variants and ablated versions of our EvoGraphNet showed that we can achieve the lowest brain graph evolution prediction error using a single baseline timepoint. Our EvoGraphNet code is available at http://github.com/basiralab/EvoGraphNet.