 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNVIDIA Isaac Sim: Enabling Scalable, GPU-Accelerated Simulation for Robotics
Jun 02, 2026Simulation has become a core infrastructure for robotics research. Unlike previous simulators, NVIDIA Isaac Sim leverages GPU acceleration to enable large-scale parallel training and physics-accurate modeling. Its synthetic data generation pipeline alleviates the scarcity of high-quality training data, supporting data-driven robot learning and large-scale simulation-centric experimentation. However, existing surveys often treat it as one simulator among many, without a systematic analysis of its architectural characteristics, usage patterns, and limitations. This survey reviews Isaac Sim from system and application perspectives, outlining its architecture and comparing it with widely used simulators. We analyze representative studies across five major domains and summarize common usage patterns, particularly in data generation and high-fidelity simulation. We also outline key future directions and challenges, including physics open-world learning, simulation-centric training and practical usability constraints.
AdaVLN: Towards Visual Language Navigation in Continuous Indoor Environments with Moving Humans
Nov 27, 2024



Visual Language Navigation is a task that challenges robots to navigate in realistic environments based on natural language instructions. While previous research has largely focused on static settings, real-world navigation must often contend with dynamic human obstacles. Hence, we propose an extension to the task, termed Adaptive Visual Language Navigation (AdaVLN), which seeks to narrow this gap. AdaVLN requires robots to navigate complex 3D indoor environments populated with dynamically moving human obstacles, adding a layer of complexity to navigation tasks that mimic the real-world. To support exploration of this task, we also present AdaVLN simulator and AdaR2R datasets. The AdaVLN simulator enables easy inclusion of fully animated human models directly into common datasets like Matterport3D. We also introduce a "freeze-time" mechanism for both the navigation task and simulator, which pauses world state updates during agent inference, enabling fair comparisons and experimental reproducibility across different hardware. We evaluate several baseline models on this task, analyze the unique challenges introduced by AdaVLN, and demonstrate its potential to bridge the sim-to-real gap in VLN research.
Optimizing the optimizer for data driven deep neural networks and physics informed neural networks
May 16, 2022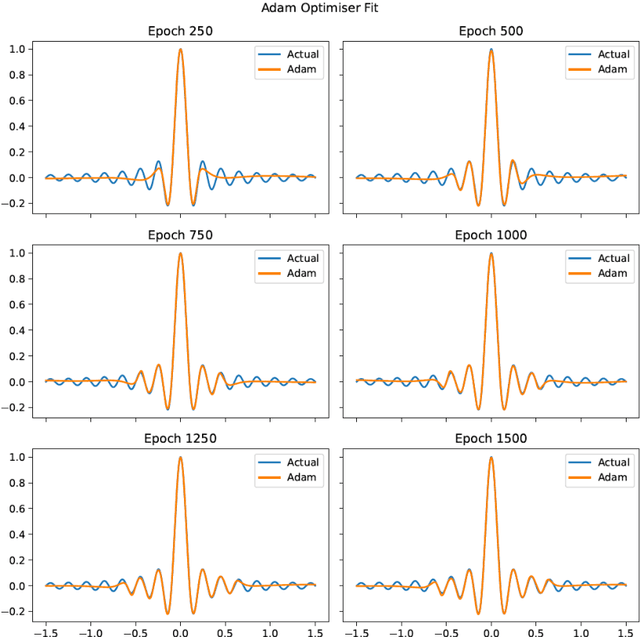
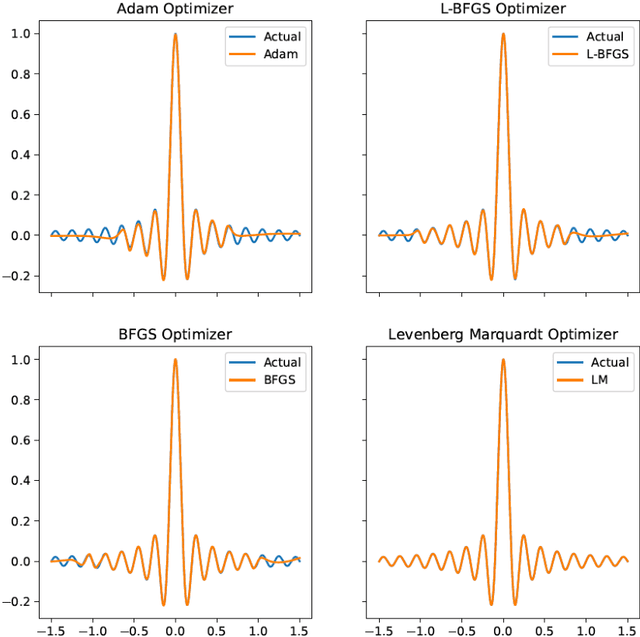
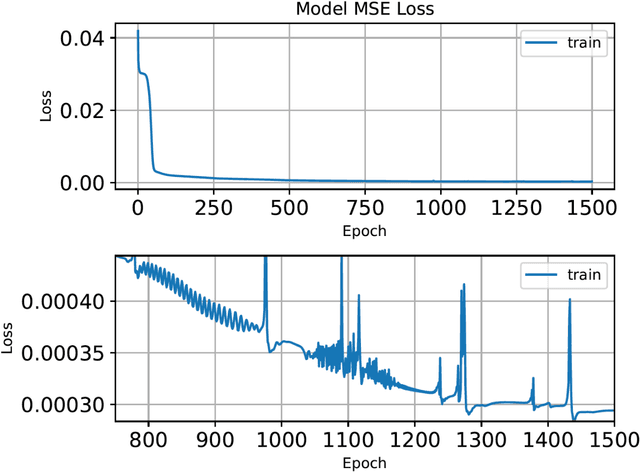
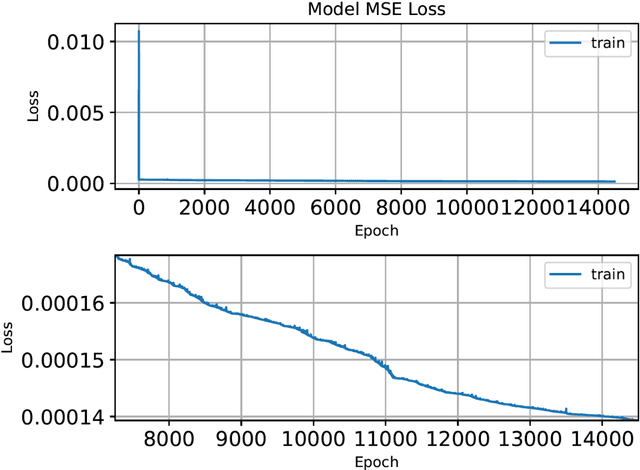
We investigate the role of the optimizer in determining the quality of the model fit for neural networks with a small to medium number of parameters. We study the performance of Adam, an algorithm for first-order gradient-based optimization that uses adaptive momentum, the Levenberg and Marquardt (LM) algorithm a second order method, Broyden,Fletcher,Goldfarb and Shanno algorithm (BFGS) a second order method and LBFGS, a low memory version of BFGS. Using these optimizers we fit the function y = sinc(10x) using a neural network with a few parameters. This function has a variable amplitude and a constant frequency. We observe that the higher amplitude components of the function are fitted first and the Adam, BFGS and LBFGS struggle to fit the lower amplitude components of the function. We also solve the Burgers equation using a physics informed neural network(PINN) with the BFGS and LM optimizers. For our example problems with a small to medium number of weights, we find that the LM algorithm is able to rapidly converge to machine precision offering significant benefits over other optimizers. We further investigated the Adam optimizer with a range of models and found that Adam optimiser requires much deeper models with large numbers of hidden units containing up to 26x more parameters, in order to achieve a model fit close that achieved by the LM optimizer. The LM optimizer results illustrate that it may be possible build models with far fewer parameters. We have implemented all our methods in Keras and TensorFlow 2.
Human-Robot Creative Interactions (HRCI): Exploring Creativity in Artificial Agents Using a Story-Telling Game
Feb 08, 2022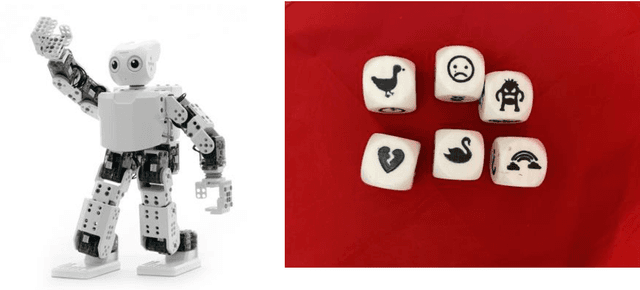
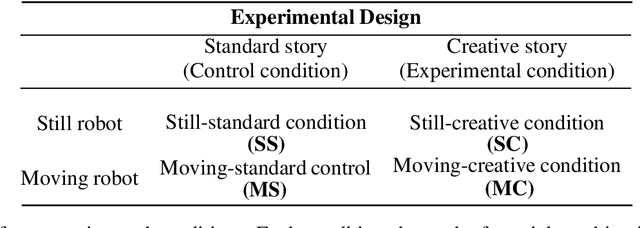
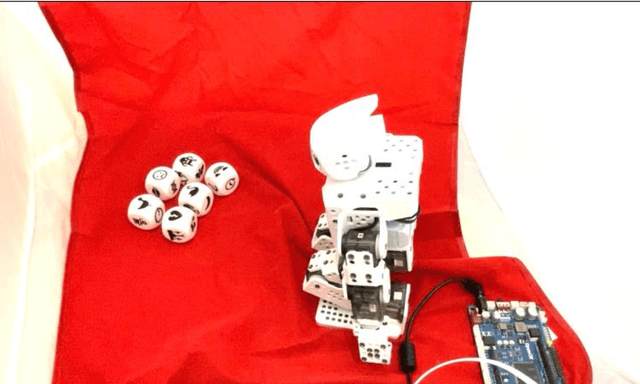

Creativity in social robots requires further attention in the interdisciplinary field of Human-Robot Interaction (HRI). This paper investigates the hypothesised connection between the perceived creative agency and the animacy of social robots. The goal of this work is to assess the relevance of robot movements in the attribution of creativity to robots. The results of this work inform the design of future Human-Robot Creative Interactions (HRCI). The study uses a storytelling game based on visual imagery inspired by the game 'Story Cubes' to explore the perceived creative agency of social robots. This game is used to tell a classic story for children with an alternative ending. A 2x2 experiment was designed to compare two conditions: the robot telling the original version of the story and the robot plot-twisting the end of the story. A Robotis Mini humanoid robot was used for the experiment. As a novel contribution, we propose an adaptation of the Short Scale Creative Self scale (SSCS) to measure perceived creative agency in robots. We also use the Godspeed scale to explore different attributes of social robots in this setting. We did not obtain significant main effects of the robot movements or the story in the participants' scores. However, we identified significant main effects of the robot movements in features of animacy, likeability, and perceived safety. This initial work encourages further studies experimenting with different robot embodiment and movements to evaluate the perceived creative agency in robots and inform the design of future robots that participate in creative interactions.