 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving 3D Foot Motion Reconstruction in Markerless Monocular Human Motion Capture
Mar 10, 2026State-of-the-art methods can recover accurate overall 3D human body motion from in-the-wild videos. However, they often fail to capture fine-grained articulations, especially in the feet, which are critical for applications such as gait analysis and animation. This limitation results from training datasets with inaccurate foot annotations and limited foot motion diversity. We address this gap with FootMR, a Foot Motion Refinement method that refines foot motion estimated by an existing human recovery model through lifting 2D foot keypoint sequences to 3D. By avoiding direct image input, FootMR circumvents inaccurate image-3D annotation pairs and can instead leverage large-scale motion capture data. To resolve ambiguities of 2D-to-3D lifting, FootMR incorporates knee and foot motion as context and predicts only residual foot motion. Generalization to extreme foot poses is further improved by representing joints in global rather than parent-relative rotations and applying extensive data augmentation. To support evaluation of foot motion reconstruction, we introduce MOOF, a 2D dataset of complex foot movements. Experiments on MOOF, MOYO, and RICH show that FootMR outperforms state-of-the-art methods, reducing ankle joint angle error on MOYO by up to 30% over the best video-based approach.
Utilizing Uncertainty in 2D Pose Detectors for Probabilistic 3D Human Mesh Recovery
Nov 25, 2024Monocular 3D human pose and shape estimation is an inherently ill-posed problem due to depth ambiguities, occlusions, and truncations. Recent probabilistic approaches learn a distribution over plausible 3D human meshes by maximizing the likelihood of the ground-truth pose given an image. We show that this objective function alone is not sufficient to best capture the full distributions. Instead, we propose to additionally supervise the learned distributions by minimizing the distance to distributions encoded in heatmaps of a 2D pose detector. Moreover, we reveal that current methods often generate incorrect hypotheses for invisible joints which is not detected by the evaluation protocols. We demonstrate that person segmentation masks can be utilized during training to significantly decrease the number of invalid samples and introduce two metrics to evaluate it. Our normalizing flow-based approach predicts plausible 3D human mesh hypotheses that are consistent with the image evidence while maintaining high diversity for ambiguous body parts. Experiments on 3DPW and EMDB show that we outperform other state-of-the-art probabilistic methods. Code is available for research purposes at https://github.com/twehrbein/humr.
Personalized 3D Human Pose and Shape Refinement
Mar 18, 2024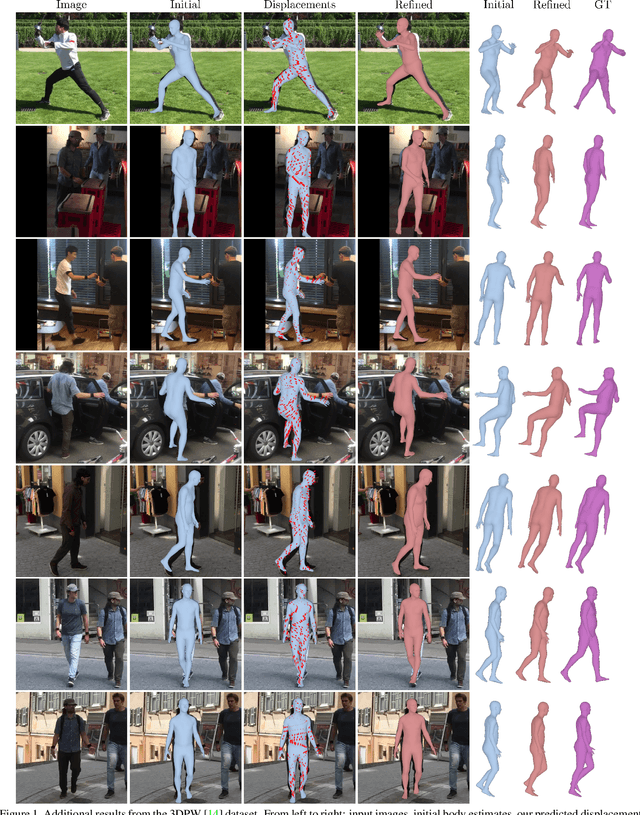
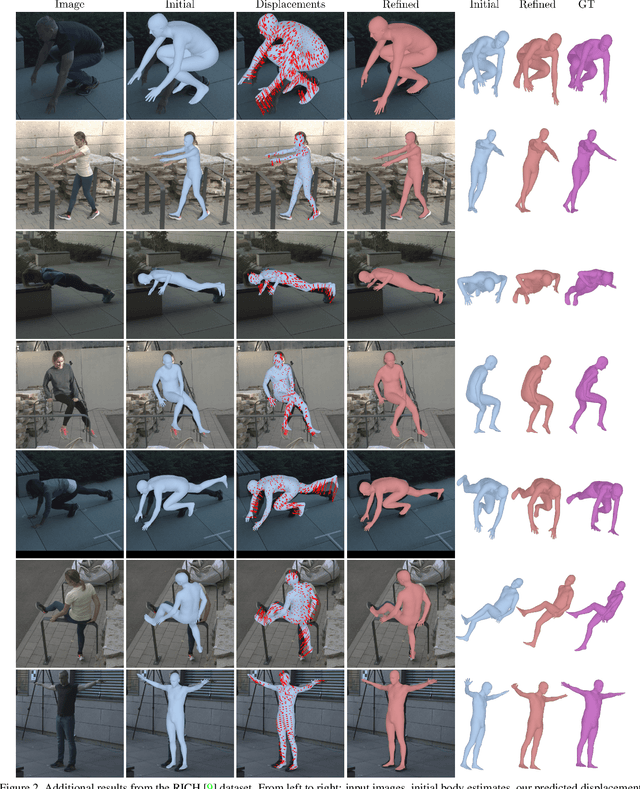
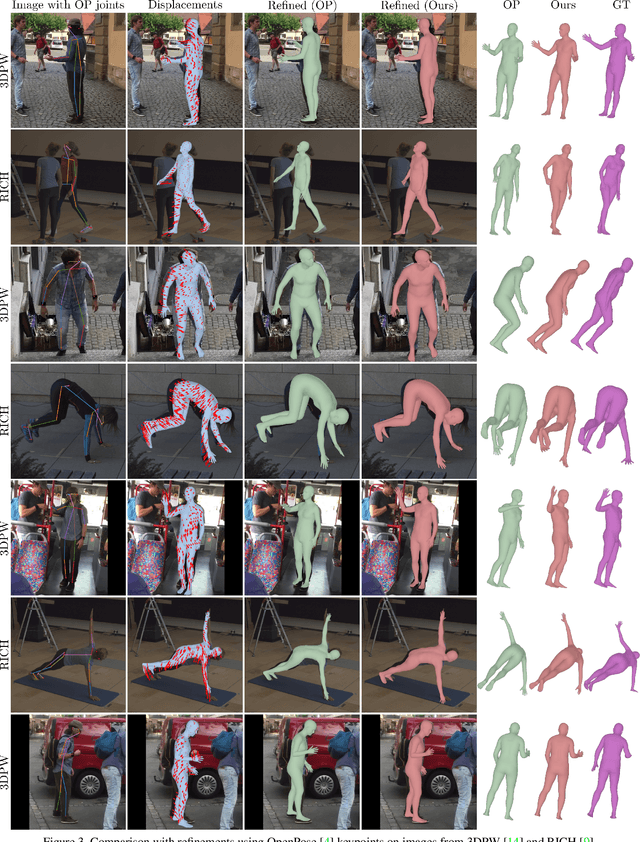
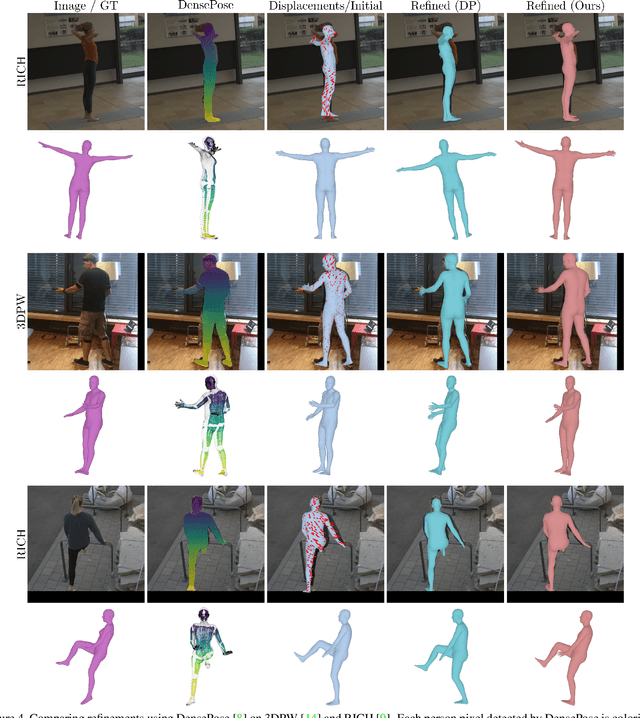
Recently, regression-based methods have dominated the field of 3D human pose and shape estimation. Despite their promising results, a common issue is the misalignment between predictions and image observations, often caused by minor joint rotation errors that accumulate along the kinematic chain. To address this issue, we propose to construct dense correspondences between initial human model estimates and the corresponding images that can be used to refine the initial predictions. To this end, we utilize renderings of the 3D models to predict per-pixel 2D displacements between the synthetic renderings and the RGB images. This allows us to effectively integrate and exploit appearance information of the persons. Our per-pixel displacements can be efficiently transformed to per-visible-vertex displacements and then used for 3D model refinement by minimizing a reprojection loss. To demonstrate the effectiveness of our approach, we refine the initial 3D human mesh predictions of multiple models using different refinement procedures on 3DPW and RICH. We show that our approach not only consistently leads to better image-model alignment, but also to improved 3D accuracy.
* Accepted to 2023 IEEE/CVF International Conference on Computer Vision Workshops (ICCVW)
Asymmetric Student-Teacher Networks for Industrial Anomaly Detection
Oct 18, 2022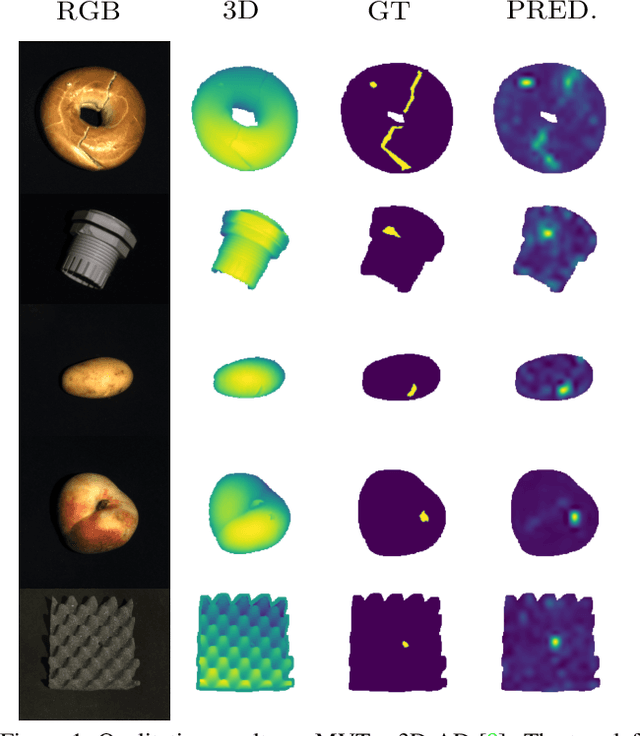
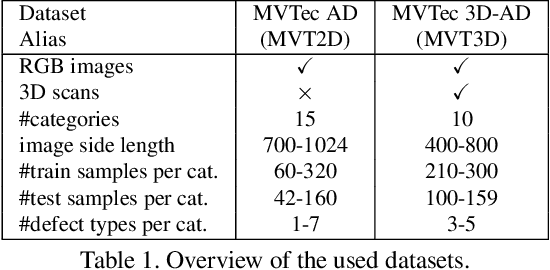

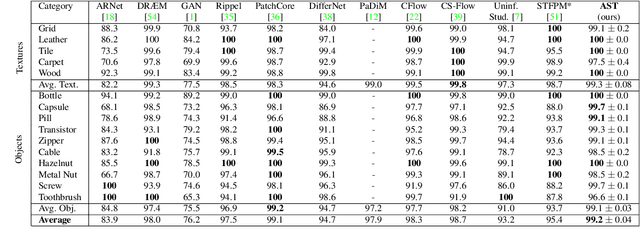
Industrial defect detection is commonly addressed with anomaly detection (AD) methods where no or only incomplete data of potentially occurring defects is available. This work discovers previously unknown problems of student-teacher approaches for AD and proposes a solution, where two neural networks are trained to produce the same output for the defect-free training examples. The core assumption of student-teacher networks is that the distance between the outputs of both networks is larger for anomalies since they are absent in training. However, previous methods suffer from the similarity of student and teacher architecture, such that the distance is undesirably small for anomalies. For this reason, we propose asymmetric student-teacher networks (AST). We train a normalizing flow for density estimation as a teacher and a conventional feed-forward network as a student to trigger large distances for anomalies: The bijectivity of the normalizing flow enforces a divergence of teacher outputs for anomalies compared to normal data. Outside the training distribution the student cannot imitate this divergence due to its fundamentally different architecture. Our AST network compensates for wrongly estimated likelihoods by a normalizing flow, which was alternatively used for anomaly detection in previous work. We show that our method produces state-of-the-art results on the two currently most relevant defect detection datasets MVTec AD and MVTec 3D-AD regarding image-level anomaly detection on RGB and 3D data.
Fully Convolutional Cross-Scale-Flows for Image-based Defect Detection
Oct 06, 2021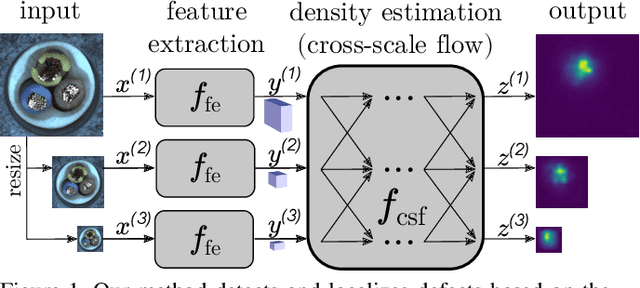
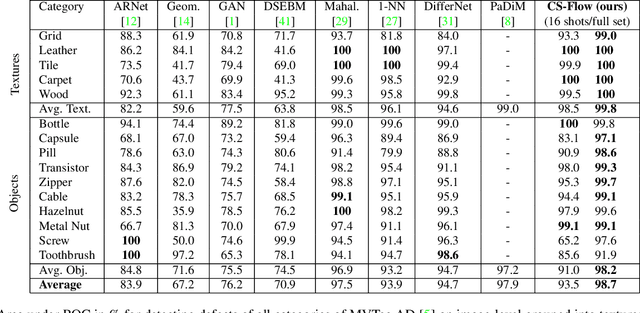
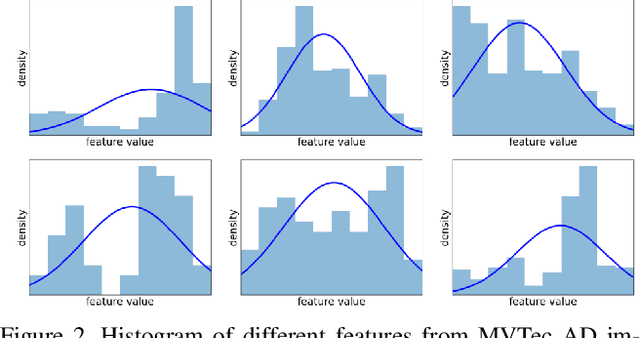
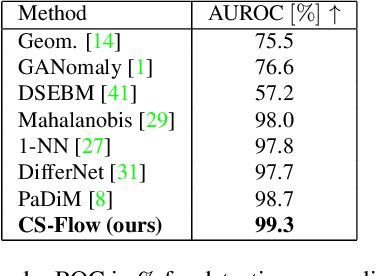
In industrial manufacturing processes, errors frequently occur at unpredictable times and in unknown manifestations. We tackle the problem of automatic defect detection without requiring any image samples of defective parts. Recent works model the distribution of defect-free image data, using either strong statistical priors or overly simplified data representations. In contrast, our approach handles fine-grained representations incorporating the global and local image context while flexibly estimating the density. To this end, we propose a novel fully convolutional cross-scale normalizing flow (CS-Flow) that jointly processes multiple feature maps of different scales. Using normalizing flows to assign meaningful likelihoods to input samples allows for efficient defect detection on image-level. Moreover, due to the preserved spatial arrangement the latent space of the normalizing flow is interpretable which enables to localize defective regions in the image. Our work sets a new state-of-the-art in image-level defect detection on the benchmark datasets Magnetic Tile Defects and MVTec AD showing a 100% AUROC on 4 out of 15 classes.
Probabilistic Monocular 3D Human Pose Estimation with Normalizing Flows
Aug 02, 2021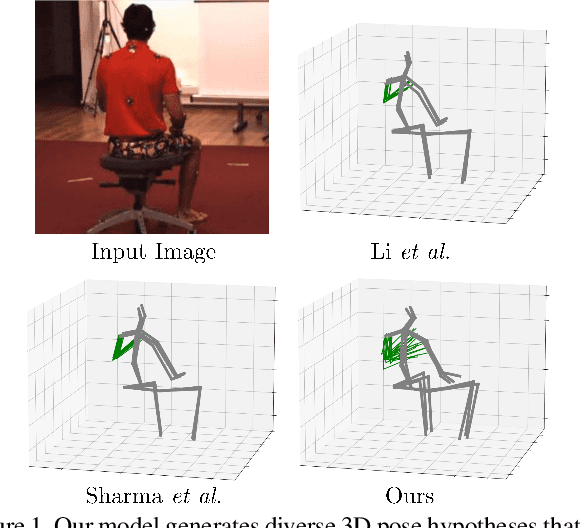
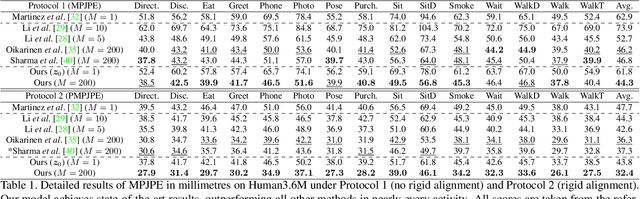
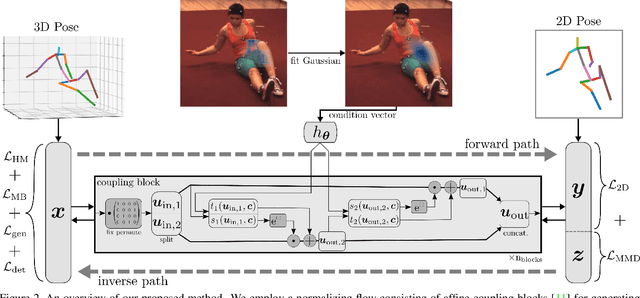
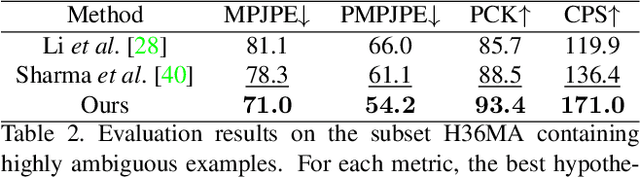
3D human pose estimation from monocular images is a highly ill-posed problem due to depth ambiguities and occlusions. Nonetheless, most existing works ignore these ambiguities and only estimate a single solution. In contrast, we generate a diverse set of hypotheses that represents the full posterior distribution of feasible 3D poses. To this end, we propose a normalizing flow based method that exploits the deterministic 3D-to-2D mapping to solve the ambiguous inverse 2D-to-3D problem. Additionally, uncertain detections and occlusions are effectively modeled by incorporating uncertainty information of the 2D detector as condition. Further keys to success are a learned 3D pose prior and a generalization of the best-of-M loss. We evaluate our approach on the two benchmark datasets Human3.6M and MPI-INF-3DHP, outperforming all comparable methods in most metrics. The implementation is available on GitHub.