 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConstrained Diffusion with Trust Sampling
Nov 17, 2024



Diffusion models have demonstrated significant promise in various generative tasks; however, they often struggle to satisfy challenging constraints. Our approach addresses this limitation by rethinking training-free loss-guided diffusion from an optimization perspective. We formulate a series of constrained optimizations throughout the inference process of a diffusion model. In each optimization, we allow the sample to take multiple steps along the gradient of the proxy constraint function until we can no longer trust the proxy, according to the variance at each diffusion level. Additionally, we estimate the state manifold of diffusion model to allow for early termination when the sample starts to wander away from the state manifold at each diffusion step. Trust sampling effectively balances between following the unconditional diffusion model and adhering to the loss guidance, enabling more flexible and accurate constrained generation. We demonstrate the efficacy of our method through extensive experiments on complex tasks, and in drastically different domains of images and 3D motion generation, showing significant improvements over existing methods in terms of generation quality. Our implementation is available at https://github.com/will-s-h/trust-sampling.
Diffusion Inertial Poser: Human Motion Reconstruction from Arbitrary Sparse IMU Configurations
Aug 31, 2023



Motion capture from a limited number of inertial measurement units (IMUs) has important applications in health, human performance, and virtual reality. Real-world limitations and application-specific goals dictate different IMU configurations (i.e., number of IMUs and chosen attachment body segments), trading off accuracy and practicality. Although recent works were successful in accurately reconstructing whole-body motion from six IMUs, these systems only work with a specific IMU configuration. Here we propose a single diffusion generative model, Diffusion Inertial Poser (DiffIP), which reconstructs human motion in real-time from arbitrary IMU configurations. We show that DiffIP has the benefit of flexibility with respect to the IMU configuration while being as accurate as the state-of-the-art for the commonly used six IMU configuration. Our system enables selecting an optimal configuration for different applications without retraining the model. For example, when only four IMUs are available, DiffIP found that the configuration that minimizes errors in joint kinematics instruments the thighs and forearms. However, global translation reconstruction is better when instrumenting the feet instead of the thighs. Although our approach is agnostic to the underlying model, we built DiffIP based on physiologically realistic musculoskeletal models to enable use in biomedical research and health applications.
Synthesis of Biologically Realistic Human Motion Using Joint Torque Actuation
Apr 30, 2019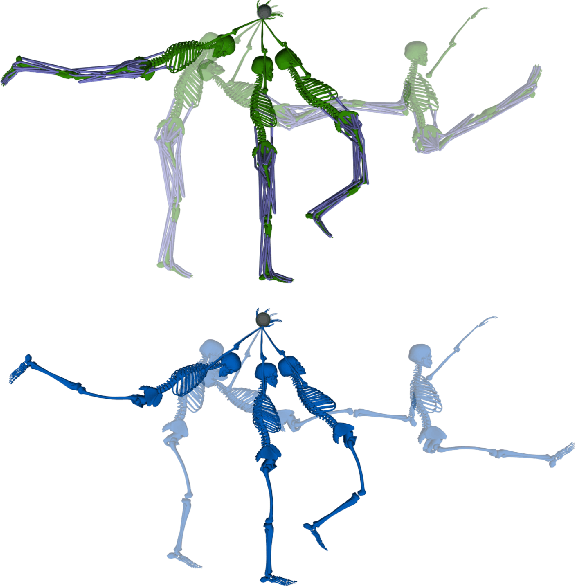
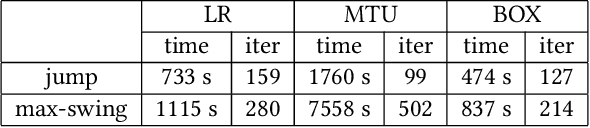
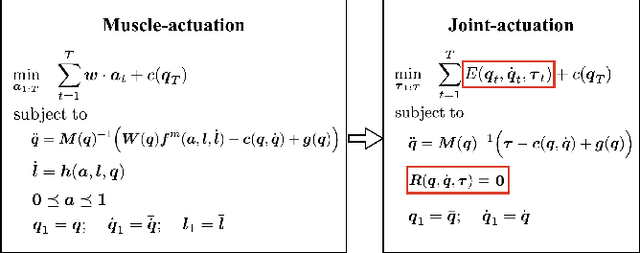
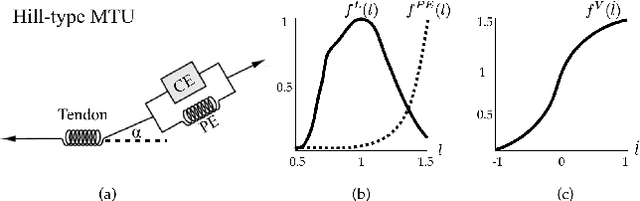
Using joint actuators to drive the skeletal movements is a common practice in character animation, but the resultant torque patterns are often unnatural or infeasible for real humans to achieve. On the other hand, physiologically-based models explicitly simulate muscles and tendons and thus produce more human-like movements and torque patterns. This paper introduces a technique to transform an optimal control problem formulated in the muscle-actuation space to an equivalent problem in the joint-actuation space, such that the solutions to both problems have the same optimal value. By solving the equivalent problem in the joint-actuation space, we can generate human-like motions comparable to those generated by musculotendon models, while retaining the benefit of simple modeling and fast computation offered by joint-actuation models. Our method transforms constant bounds on muscle activations to nonlinear, state-dependent torque limits in the joint-actuation space. In addition, the metabolic energy function on muscle activations is transformed to a nonlinear function of joint torques, joint configuration and joint velocity. Our technique can also benefit policy optimization using deep reinforcement learning approach, by providing a more anatomically realistic action space for the agent to explore during the learning process. We take the advantage of the physiologically-based simulator, OpenSim, to provide training data for learning the torque limits and the metabolic energy function. Once trained, the same torque limits and the energy function can be applied to drastically different motor tasks formulated as either trajectory optimization or policy learning.