 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFactor-Graph-Based Passive Acoustic Navigation for Decentralized Cooperative Localization Using Bearing Elevation Depth Difference
Jun 17, 2025Accurate and scalable underwater multi-agent localization remains a critical challenge due to the constraints of underwater communication. In this work, we propose a multi-agent localization framework using a factor-graph representation that incorporates bearing, elevation, and depth difference (BEDD). Our method leverages inverted ultra-short baseline (inverted-USBL) derived azimuth and elevation measurements from incoming acoustic signals and relative depth measurements to enable cooperative localization for a multi-robot team of autonomous underwater vehicles (AUVs). We validate our approach in the HoloOcean underwater simulator with a fleet of AUVs, demonstrating improved localization accuracy compared to dead reckoning. Additionally, we investigate the impact of azimuth and elevation measurement outliers, highlighting the need for robust outlier rejection techniques for acoustic signals.
Group-$k$ consistent measurement set maximization via maximum clique over k-Uniform hypergraphs for robust multi-robot map merging
Aug 04, 2023



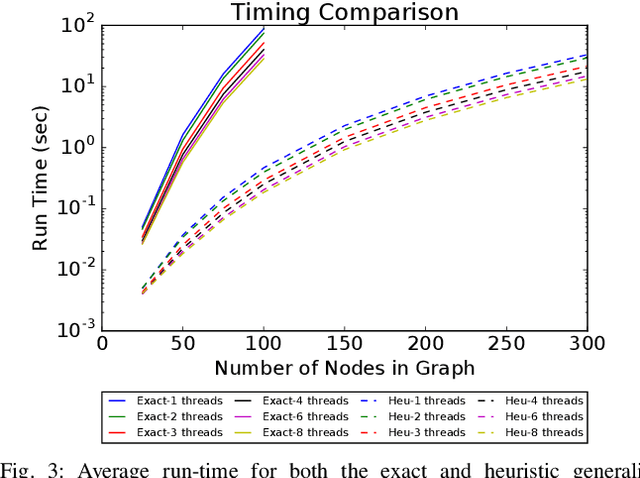
This paper unifies the theory of consistent-set maximization for robust outlier detection in a simultaneous localization and mapping framework. We first describe the notion of pairwise consistency before discussing how a consistency graph can be formed by evaluating pairs of measurements for consistency. Finding the largest set of consistent measurements is transformed into an instance of the maximum clique problem and can be solved relatively quickly using existing maximum-clique solvers. We then generalize our algorithm to check consistency on a group-$k$ basis by using a generalized notion of consistency and using generalized graphs. We also present modified maximum clique algorithms that function on generalized graphs to find the set of measurements that is internally group-$k$ consistent. We address the exponential nature of group-$k$ consistency and present methods that can substantially decrease the number of necessary checks performed when evaluating consistency. We extend our prior work to multi-agent systems in both simulation and hardware and provide a comparison with other state-of-the-art methods.
Group-$k$ Consistent Measurement Set Maximization for Robust Outlier Detection
Sep 06, 2022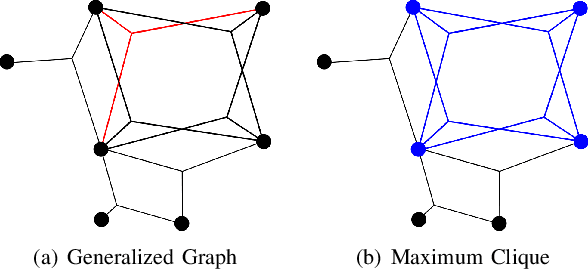
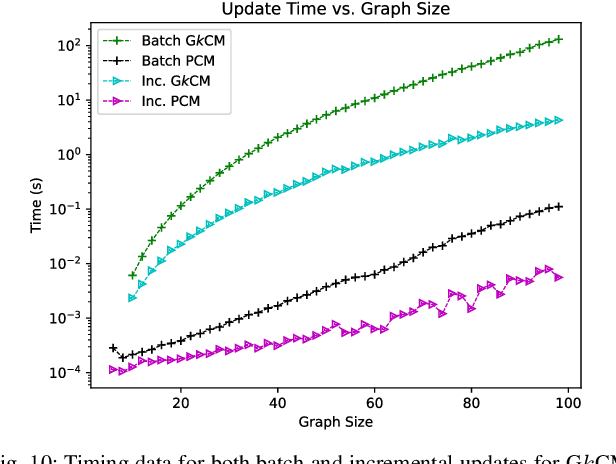
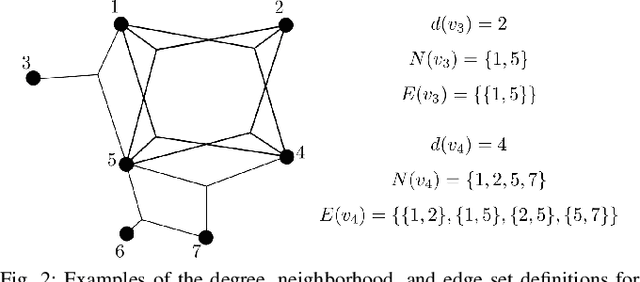
This paper presents a method for the robust selection of measurements in a simultaneous localization and mapping (SLAM) framework. Existing methods check consistency or compatibility on a pairwise basis, however many measurement types are not sufficiently constrained in a pairwise scenario to determine if either measurement is inconsistent with the other. This paper presents group-$k$ consistency maximization (G$k$CM) that estimates the largest set of measurements that is internally group-$k$ consistent. Solving for the largest set of group-$k$ consistent measurements can be formulated as an instance of the maximum clique problem on generalized graphs and can be solved by adapting current methods. This paper evaluates the performance of G$k$CM using simulated data and compares it to pairwise consistency maximization (PCM) presented in previous work.