 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResponsibility in a Multi-Value Strategic Setting
Oct 22, 2024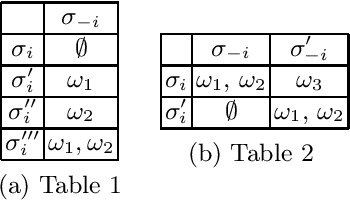
Responsibility is a key notion in multi-agent systems and in creating safe, reliable and ethical AI. However, most previous work on responsibility has only considered responsibility for single outcomes. In this paper we present a model for responsibility attribution in a multi-agent, multi-value setting. We also expand our model to cover responsibility anticipation, demonstrating how considerations of responsibility can help an agent to select strategies that are in line with its values. In particular we show that non-dominated regret-minimising strategies reliably minimise an agent's expected degree of responsibility.
Computational Grounding of Responsibility Attribution and Anticipation in LTLf
Oct 18, 2024Responsibility is one of the key notions in machine ethics and in the area of autonomous systems. It is a multi-faceted notion involving counterfactual reasoning about actions and strategies. In this paper, we study different variants of responsibility in a strategic setting based on LTLf. We show a connection with notions in reactive synthesis, including synthesis of winning, dominant, and best-effort strategies. This connection provides the building blocks for a computational grounding of responsibility including complexity characterizations and sound, complete, and optimal algorithms for attributing and anticipating responsibility.
Anticipating Responsibility in Multiagent Planning
Jul 31, 2023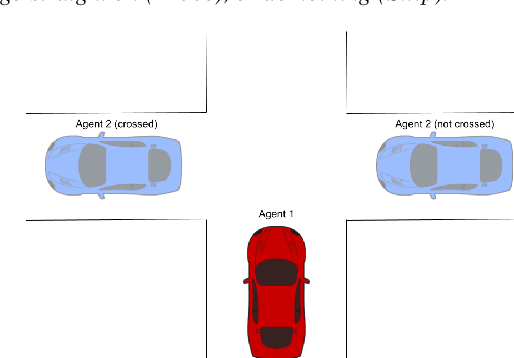
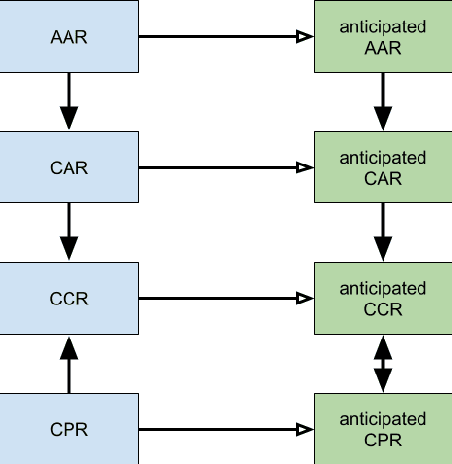
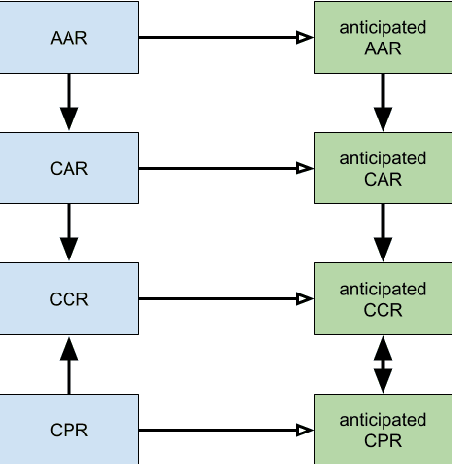
Responsibility anticipation is the process of determining if the actions of an individual agent may cause it to be responsible for a particular outcome. This can be used in a multi-agent planning setting to allow agents to anticipate responsibility in the plans they consider. The planning setting in this paper includes partial information regarding the initial state and considers formulas in linear temporal logic as positive or negative outcomes to be attained or avoided. We firstly define attribution for notions of active, passive and contributive responsibility, and consider their agentive variants. We then use these to define the notion of responsibility anticipation. We prove that our notions of anticipated responsibility can be used to coordinate agents in a planning setting and give complexity results for our model, discussing equivalence with classical planning. We also present an outline for solving some of our attribution and anticipation problems using PDDL solvers.
Logic-Based Ethical Planning
Jun 02, 2022In this paper we propose a framework for ethical decision making in the context of planning, with intended application to robotics. We put forward a compact but highly expressive language for ethical planning that combines linear temporal logic with lexicographic preference modelling. This original combination allows us to assess plans both with respect to an agent's values and their desires, introducing the novel concept of the morality level of an agent and moving towards multigoal, multivalue planning. We initiate the study of computational complexity of planning tasks in our setting, and we discuss potential applications to robotics.