 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarq Compute Engine: Design, Benchmark, and Deploy State-of-the-Art Binarized Neural Networks
Nov 18, 2020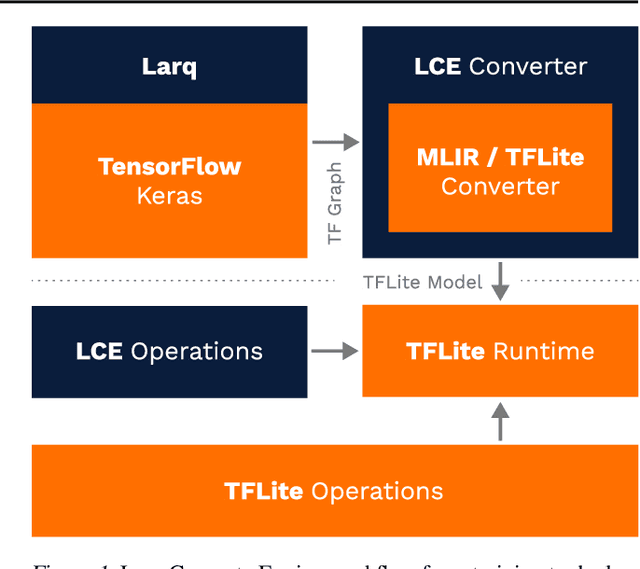
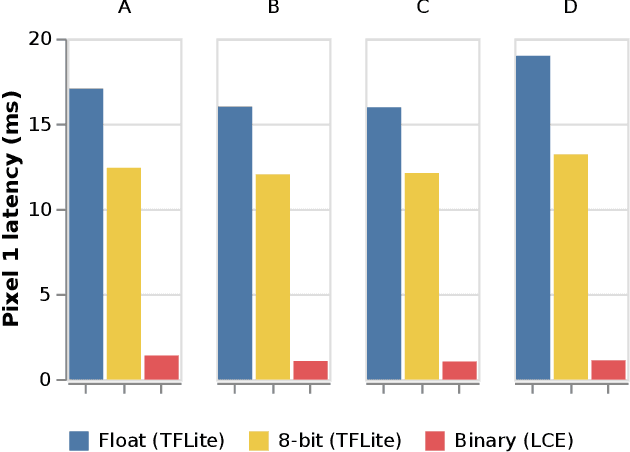
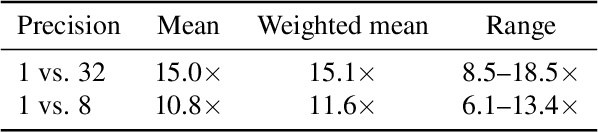
We introduce Larq Compute Engine, the world's fastest Binarized Neural Network (BNN) inference engine, and use this framework to investigate several important questions about the efficiency of BNNs and to design a new state-of-the-art BNN architecture. LCE provides highly optimized implementations of binary operations and accelerates binary convolutions by 8.5 - 18.5x compared to their full-precision counterparts on Pixel 1 phones. LCE's integration with Larq and a sophisticated MLIR-based converter allow users to move smoothly from training to deployment. By extending TensorFlow and TensorFlow Lite, LCE supports models which combine binary and full-precision layers, and can be easily integrated into existing applications. Using LCE, we analyze the performance of existing BNN computer vision architectures and develop QuickNet, a simple, easy-to-reproduce BNN that outperforms existing binary networks in terms of latency and accuracy on ImageNet. Furthermore, we investigate the impact of full-precision shortcuts and the relationship between number of MACs and model latency. We are convinced that empirical performance should drive BNN architecture design and hope this work will facilitate others to design, benchmark and deploy binary models.
Vision-based Navigation Using Deep Reinforcement Learning
Aug 08, 2019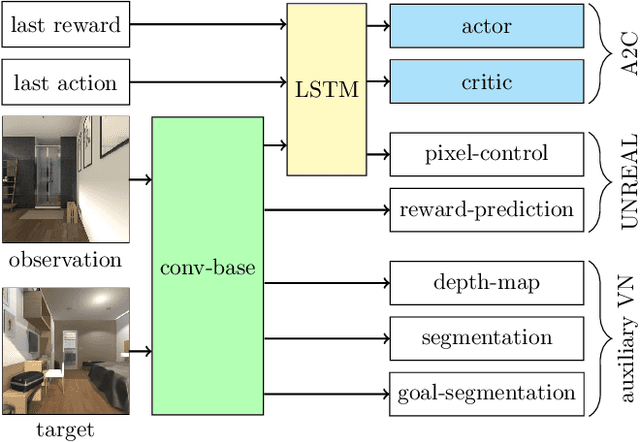
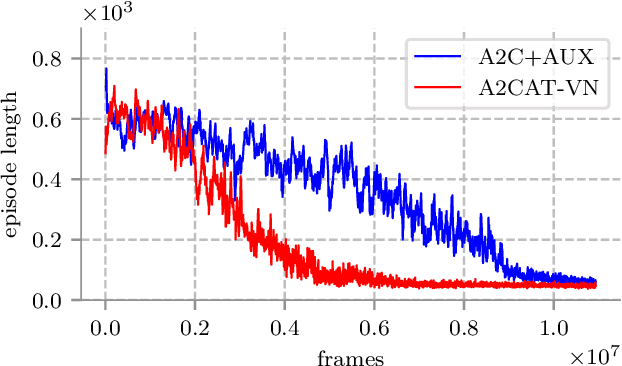
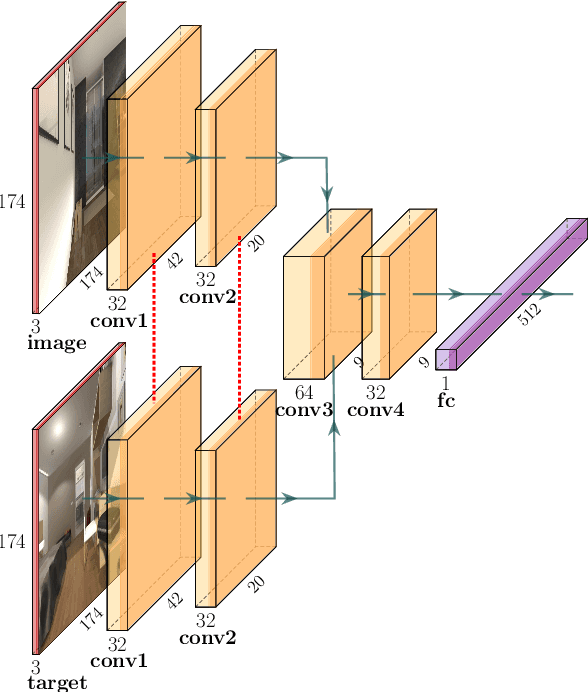
Deep reinforcement learning (RL) has been successfully applied to a variety of game-like environments. However, the application of deep RL to visual navigation with realistic environments is a challenging task. We propose a novel learning architecture capable of navigating an agent, e.g. a mobile robot, to a target given by an image. To achieve this, we have extended the batched A2C algorithm with auxiliary tasks designed to improve visual navigation performance. We propose three additional auxiliary tasks: predicting the segmentation of the observation image and of the target image and predicting the depth-map. These tasks enable the use of supervised learning to pre-train a large part of the network and to reduce the number of training steps substantially. The training performance has been further improved by increasing the environment complexity gradually over time. An efficient neural network structure is proposed, which is capable of learning for multiple targets in multiple environments. Our method navigates in continuous state spaces and on the AI2-THOR environment simulator outperforms state-of-the-art goal-oriented visual navigation methods from the literature.