 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDragLoRA: Online Optimization of LoRA Adapters for Drag-based Image Editing in Diffusion Model
May 18, 2025Drag-based editing within pretrained diffusion model provides a precise and flexible way to manipulate foreground objects. Traditional methods optimize the input feature obtained from DDIM inversion directly, adjusting them iteratively to guide handle points towards target locations. However, these approaches often suffer from limited accuracy due to the low representation ability of the feature in motion supervision, as well as inefficiencies caused by the large search space required for point tracking. To address these limitations, we present DragLoRA, a novel framework that integrates LoRA (Low-Rank Adaptation) adapters into the drag-based editing pipeline. To enhance the training of LoRA adapters, we introduce an additional denoising score distillation loss which regularizes the online model by aligning its output with that of the original model. Additionally, we improve the consistency of motion supervision by adapting the input features using the updated LoRA, giving a more stable and accurate input feature for subsequent operations. Building on this, we design an adaptive optimization scheme that dynamically toggles between two modes, prioritizing efficiency without compromising precision. Extensive experiments demonstrate that DragLoRA significantly enhances the control precision and computational efficiency for drag-based image editing. The Codes of DragLoRA are available at: https://github.com/Sylvie-X/DragLoRA.
ComOpT: Combination and Optimization for Testing Autonomous Driving Systems
Oct 02, 2021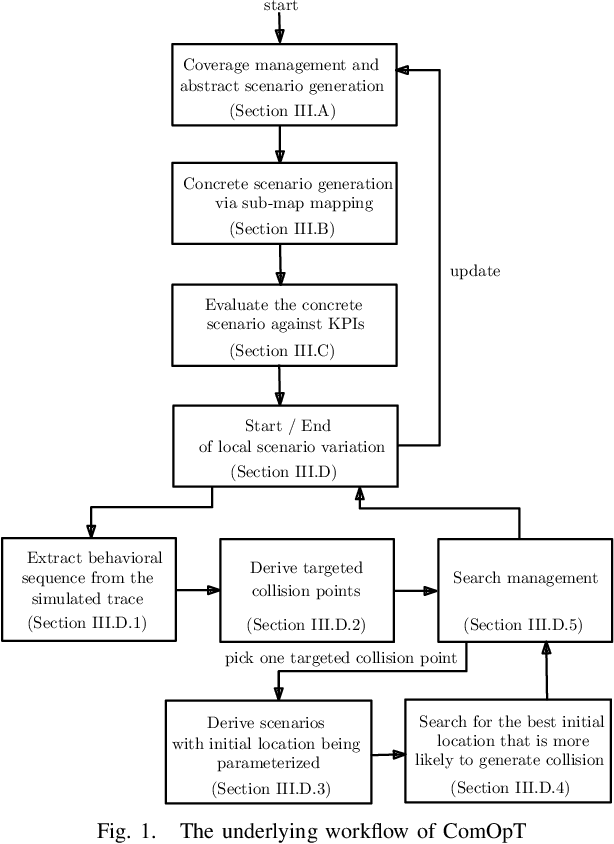
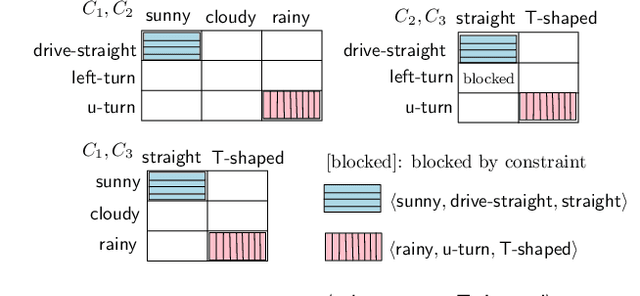
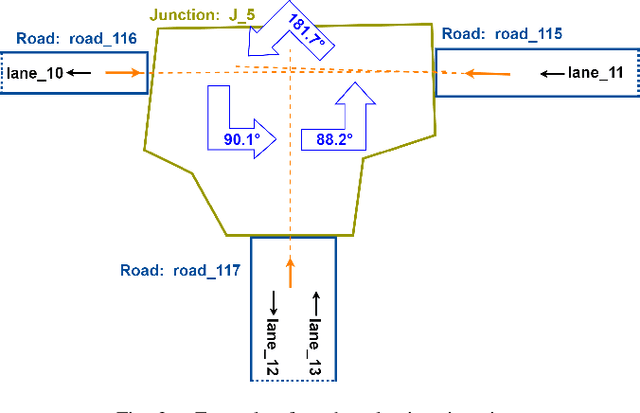
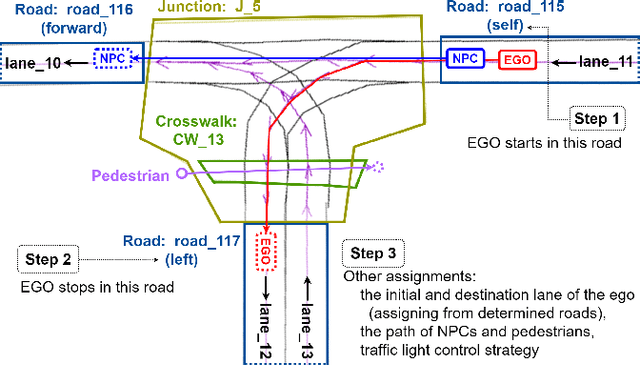
ComOpT is an open-source research tool for coverage-driven testing of autonomous driving systems, focusing on planning and control. Starting with (i) a meta-model characterizing discrete conditions to be considered and (ii) constraints specifying the impossibility of certain combinations, ComOpT first generates constraint-feasible abstract scenarios while maximally increasing the coverage of k-way combinatorial testing. Each abstract scenario can be viewed as a conceptual equivalence class, which is then instantiated into multiple concrete scenarios by (1) randomly picking one local map that fulfills the specified geographical condition, and (2) assigning all actors accordingly with parameters within the range. Finally, ComOpT evaluates each concrete scenario against a set of KPIs and performs local scenario variation via spawning a new agent that might lead to a collision at designated points. We use ComOpT to test the Apollo~6 autonomous driving software stack. ComOpT can generate highly diversified scenarios with limited test budgets while uncovering problematic situations such as inabilities to make simple right turns, uncomfortable accelerations, and dangerous driving patterns. ComOpT participated in the 2021 IEEE AI Autonomous Vehicle Testing Challenge and won first place among more than 110 contending teams.