 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMS23D: A 3D Object Detection Method Using Multi-Scale Semantic Feature Points to Construct 3D Feature Layer
Sep 09, 2023Lidar point clouds, as a type of data with accurate distance perception, can effectively represent the motion and posture of objects in three-dimensional space. However, the sparsity and disorderliness of point clouds make it challenging to extract features directly from them. Many studies have addressed this issue by transforming point clouds into regular voxel representations. However, these methods often lead to the loss of fine-grained local feature information due to downsampling. Moreover, the sparsity of point clouds poses difficulties in efficiently aggregating features in 3D feature layer using voxel-based two-stage methods. To address these issues, this paper proposes a two-stage 3D detection framework called MS$^{2}$3D. In MS$^{2}$3D, we utilize small-sized voxels to extract fine-grained local features and large-sized voxels to capture long-range local features. Additionally, we propose a method for constructing 3D feature layer using multi-scale semantic feature points, enabling the transformation of sparse 3D feature layer into more compact representations. Furthermore, we compute the offset between feature points in the 3D feature layer and the centroid of objects, aiming to bring them as close as possible to the object's center. It significantly enhances the efficiency of feature aggregation. To validate the effectiveness of our method, we evaluated our method on the KITTI dataset and ONCE dataset together.
PV-SSD: A Projection and Voxel-based Double Branch Single-Stage 3D Object Detector
Aug 31, 2023LIDAR-based 3D object detection and classification is crucial for autonomous driving. However, inference in real-time from extremely sparse 3D data poses a formidable challenge. To address this issue, a common approach is to project point clouds onto a bird's-eye or perspective view, effectively converting them into an image-like data format. However, this excessive compression of point cloud data often leads to the loss of information. This paper proposes a 3D object detector based on voxel and projection double branch feature extraction (PV-SSD) to address the problem of information loss. We add voxel features input containing rich local semantic information, which is fully fused with the projected features in the feature extraction stage to reduce the local information loss caused by projection. A good performance is achieved compared to the previous work. In addition, this paper makes the following contributions: 1) a voxel feature extraction method with variable receptive fields is proposed; 2) a feature point sampling method by weight sampling is used to filter out the feature points that are more conducive to the detection task; 3) the MSSFA module is proposed based on the SSFA module. To verify the effectiveness of our method, we designed comparison experiments.
RMSE-ELM: Recursive Model based Selective Ensemble of Extreme Learning Machines for Robustness Improvement
Sep 23, 2014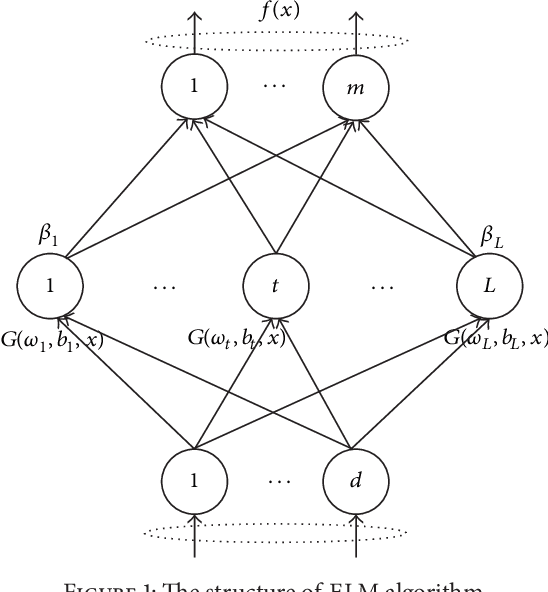



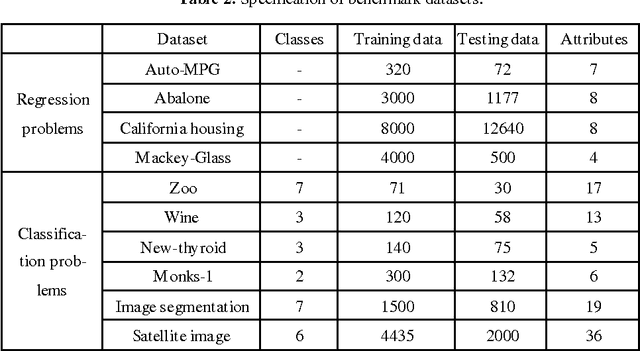
Extreme learning machine (ELM) as an emerging branch of shallow networks has shown its excellent generalization and fast learning speed. However, for blended data, the robustness of ELM is weak because its weights and biases of hidden nodes are set randomly. Moreover, the noisy data exert a negative effect. To solve this problem, a new framework called RMSE-ELM is proposed in this paper. It is a two-layer recursive model. In the first layer, the framework trains lots of ELMs in different groups concurrently, then employs selective ensemble to pick out an optimal set of ELMs in each group, which can be merged into a large group of ELMs called candidate pool. In the second layer, selective ensemble is recursively used on candidate pool to acquire the final ensemble. In the experiments, we apply UCI blended datasets to confirm the robustness of our new approach in two key aspects (mean square error and standard deviation). The space complexity of our method is increased to some degree, but the results have shown that RMSE-ELM significantly improves robustness with slightly computational time compared with representative methods (ELM, OP-ELM, GASEN-ELM, GASEN-BP and E-GASEN). It becomes a potential framework to solve robustness issue of ELM for high-dimensional blended data in the future.
Robust OS-ELM with a novel selective ensemble based on particle swarm optimization
Aug 13, 2014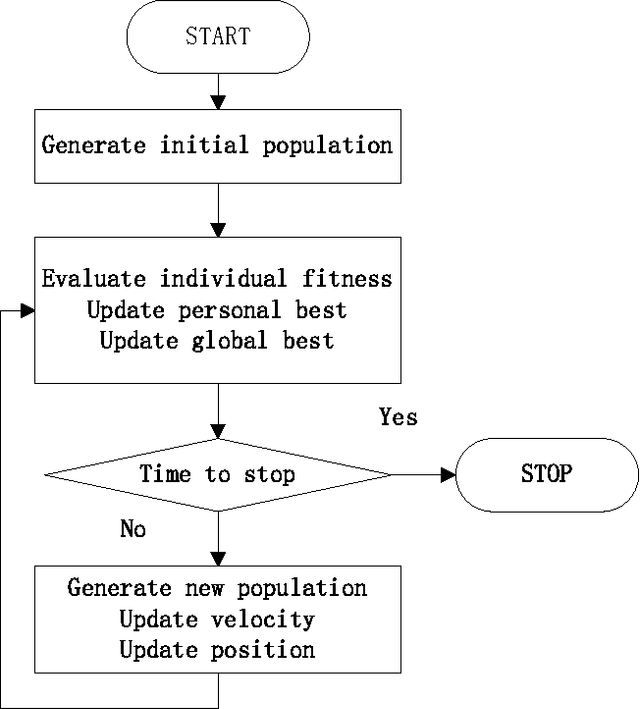
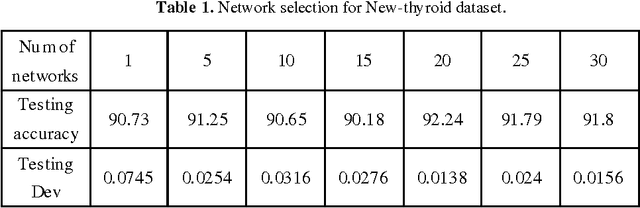
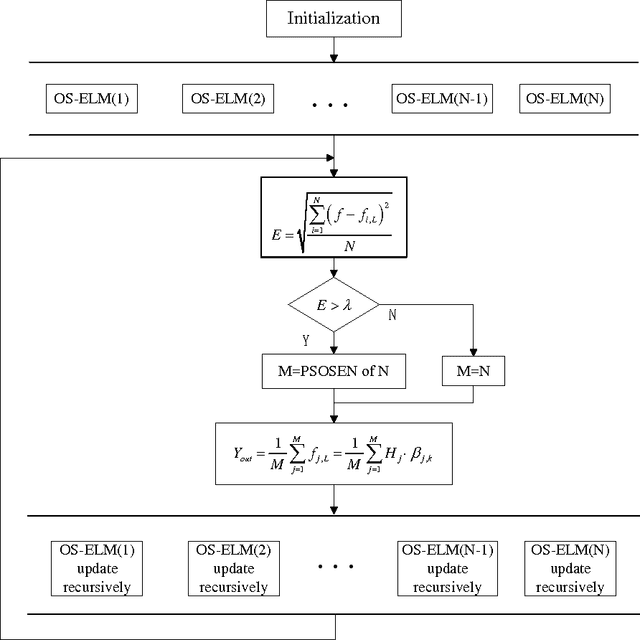
In this paper, a robust online sequential extreme learning machine (ROS-ELM) is proposed. It is based on the original OS-ELM with an adaptive selective ensemble framework. Two novel insights are proposed in this paper. First, a novel selective ensemble algorithm referred to as particle swarm optimization selective ensemble (PSOSEN) is proposed. Noting that PSOSEN is a general selective ensemble method which is applicable to any learning algorithms, including batch learning and online learning. Second, an adaptive selective ensemble framework for online learning is designed to balance the robustness and complexity of the algorithm. Experiments for both regression and classification problems with UCI data sets are carried out. Comparisons between OS-ELM, simple ensemble OS-ELM (EOS-ELM) and the proposed ROS-ELM empirically show that ROS-ELM significantly improves the robustness and stability.