 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredicting Semantic Map Representations from Images using Pyramid Occupancy Networks
Mar 30, 2020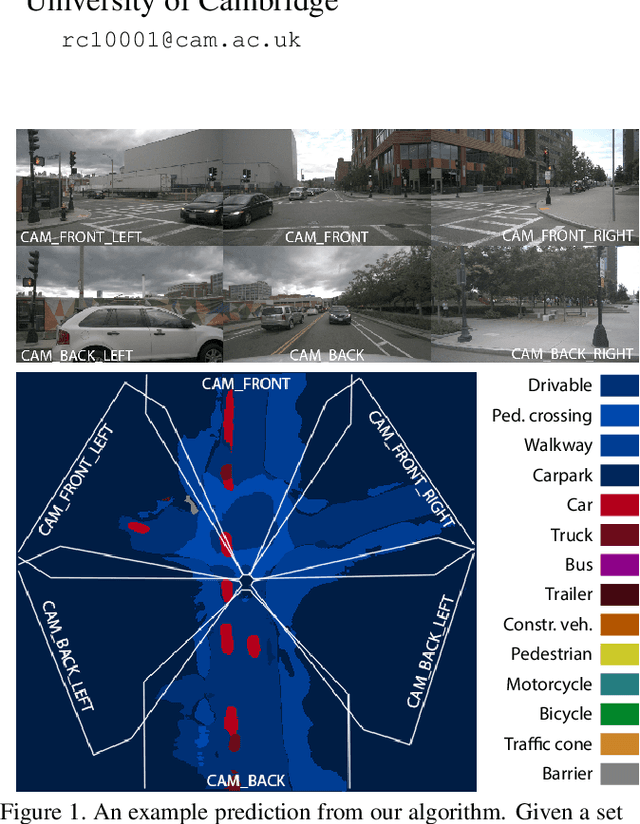
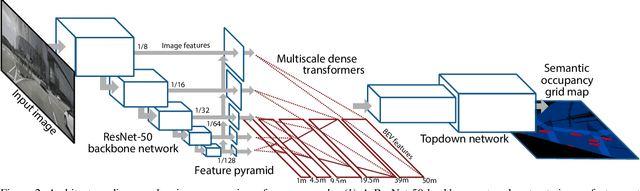

Autonomous vehicles commonly rely on highly detailed birds-eye-view maps of their environment, which capture both static elements of the scene such as road layout as well as dynamic elements such as other cars and pedestrians. Generating these map representations on the fly is a complex multi-stage process which incorporates many important vision-based elements, including ground plane estimation, road segmentation and 3D object detection. In this work we present a simple, unified approach for estimating maps directly from monocular images using a single end-to-end deep learning architecture. For the maps themselves we adopt a semantic Bayesian occupancy grid framework, allowing us to trivially accumulate information over multiple cameras and timesteps. We demonstrate the effectiveness of our approach by evaluating against several challenging baselines on the NuScenes and Argoverse datasets, and show that we are able to achieve a relative improvement of 9.1% and 22.3% respectively compared to the best-performing existing method.
Orthographic Feature Transform for Monocular 3D Object Detection
Nov 20, 2018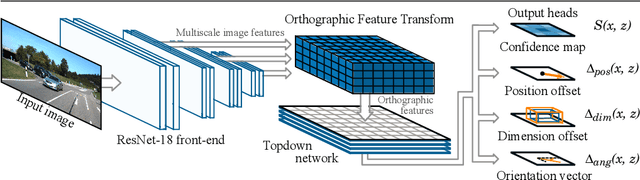
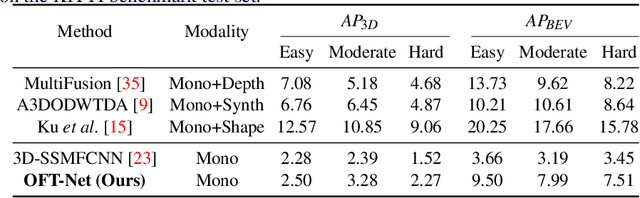
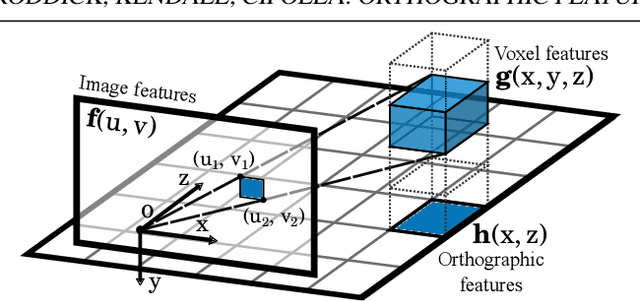
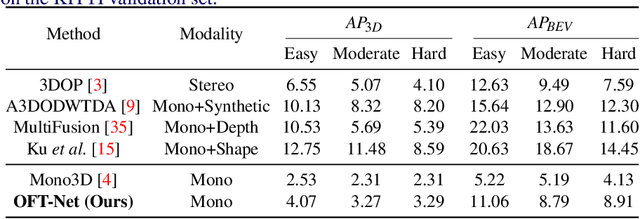
3D object detection from monocular images has proven to be an enormously challenging task, with the performance of leading systems not yet achieving even 10\% of that of LiDAR-based counterparts. One explanation for this performance gap is that existing systems are entirely at the mercy of the perspective image-based representation, in which the appearance and scale of objects varies drastically with depth and meaningful distances are difficult to infer. In this work we argue that the ability to reason about the world in 3D is an essential element of the 3D object detection task. To this end, we introduce the orthographic feature transform, which enables us to escape the image domain by mapping image-based features into an orthographic 3D space. This allows us to reason holistically about the spatial configuration of the scene in a domain where scale is consistent and distances between objects are meaningful. We apply this transformation as part of an end-to-end deep learning architecture and achieve state-of-the-art performance on the KITTI 3D object benchmark.\footnote{We will release full source code and pretrained models upon acceptance of this manuscript for publication.
Creatures great and SMAL: Recovering the shape and motion of animals from video
Nov 14, 2018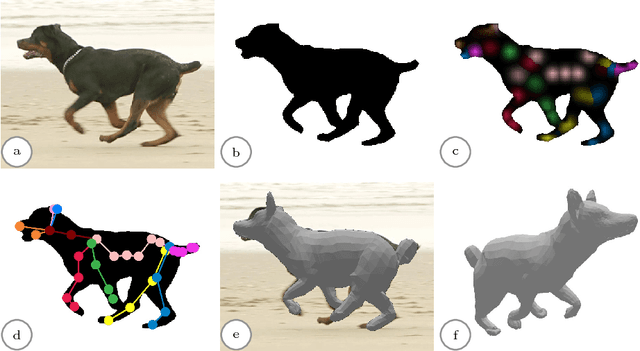
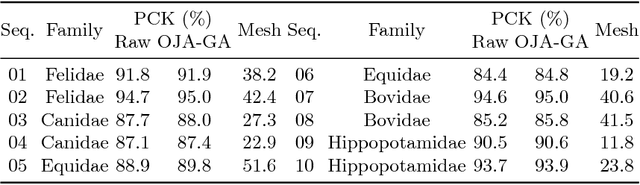
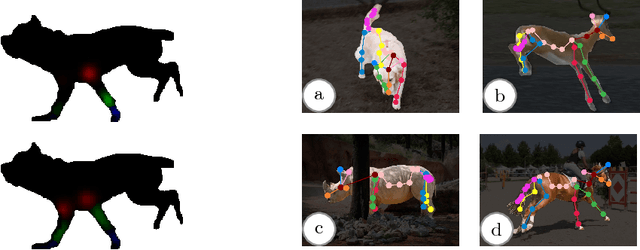

We present a system to recover the 3D shape and motion of a wide variety of quadrupeds from video. The system comprises a machine learning front-end which predicts candidate 2D joint positions, a discrete optimization which finds kinematically plausible joint correspondences, and an energy minimization stage which fits a detailed 3D model to the image. In order to overcome the limited availability of motion capture training data from animals, and the difficulty of generating realistic synthetic training images, the system is designed to work on silhouette data. The joint candidate predictor is trained on synthetically generated silhouette images, and at test time, deep learning methods or standard video segmentation tools are used to extract silhouettes from real data. The system is tested on animal videos from several species, and shows accurate reconstructions of 3D shape and pose.