 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAI-enabled Cyber-Physical In-Orbit Factory -- AI approaches based on digital twin technology for robotic small satellite production
Feb 05, 2024With the ever increasing number of active satellites in space, the rising demand for larger formations of small satellites and the commercialization of the space industry (so-called New Space), the realization of manufacturing processes in orbit comes closer to reality. Reducing launch costs and risks, allowing for faster on-demand deployment of individually configured satellites as well as the prospect for possible on-orbit servicing for satellites makes the idea of realizing an in-orbit factory promising. In this paper, we present a novel approach to an in-orbit factory of small satellites covering a digital process twin, AI-based fault detection, and teleoperated robot-control, which are being researched as part of the "AI-enabled Cyber-Physical In-Orbit Factory" project. In addition to the integration of modern automation and Industry 4.0 production approaches, the question of how artificial intelligence (AI) and learning approaches can be used to make the production process more robust, fault-tolerant and autonomous is addressed. This lays the foundation for a later realisation of satellite production in space in the form of an in-orbit factory. Central aspect is the development of a robotic AIT (Assembly, Integration and Testing) system where a small satellite could be assembled by a manipulator robot from modular subsystems. Approaches developed to improving this production process with AI include employing neural networks for optical and electrical fault detection of components. Force sensitive measuring and motion training helps to deal with uncertainties and tolerances during assembly. An AI-guided teleoperated control of the robot arm allows for human intervention while a Digital Process Twin represents process data and provides supervision during the whole production process. Approaches and results towards automated satellite production are presented in detail.
Model Mediated Teleoperation with a Hand-Arm Exoskeleton in Long Time Delays Using Reinforcement Learning
Jul 01, 2021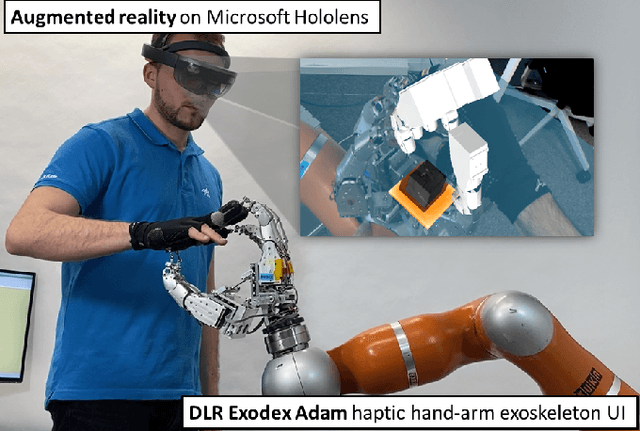
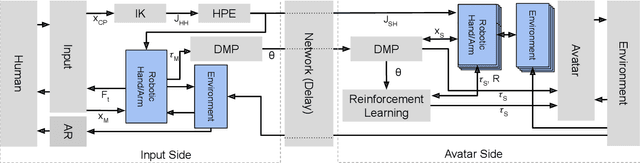
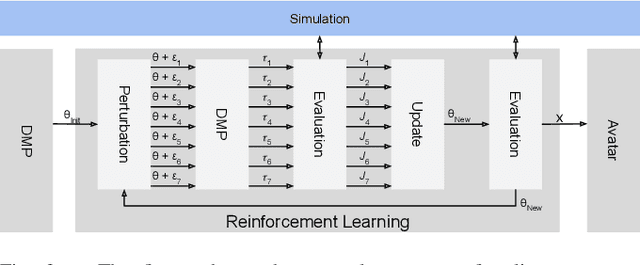
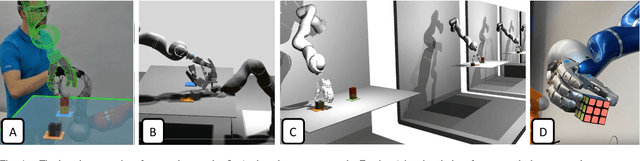
Telerobotic systems must adapt to new environmental conditions and deal with high uncertainty caused by long-time delays. As one of the best alternatives to human-level intelligence, Reinforcement Learning (RL) may offer a solution to cope with these issues. This paper proposes to integrate RL with the Model Mediated Teleoperation (MMT) concept. The teleoperator interacts with a simulated virtual environment, which provides instant feedback. Whereas feedback from the real environment is delayed, feedback from the model is instantaneous, leading to high transparency. The MMT is realized in combination with an intelligent system with two layers. The first layer utilizes Dynamic Movement Primitives (DMP) which accounts for certain changes in the avatar environment. And, the second layer addresses the problems caused by uncertainty in the model using RL methods. Augmented reality was also provided to fuse the avatar device and virtual environment models for the teleoperator. Implemented on DLR's Exodex Adam hand-arm haptic exoskeleton, the results show RL methods are able to find different solutions when changes are applied to the object position after the demonstration. The results also show DMPs to be effective at adapting to new conditions where there is no uncertainty involved.