 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMinistral 3
Jan 13, 2026We introduce the Ministral 3 series, a family of parameter-efficient dense language models designed for compute and memory constrained applications, available in three model sizes: 3B, 8B, and 14B parameters. For each model size, we release three variants: a pretrained base model for general-purpose use, an instruction finetuned, and a reasoning model for complex problem-solving. In addition, we present our recipe to derive the Ministral 3 models through Cascade Distillation, an iterative pruning and continued training with distillation technique. Each model comes with image understanding capabilities, all under the Apache 2.0 license.
Online 3D Scene Reconstruction Using Neural Object Priors
Mar 24, 2025This paper addresses the problem of reconstructing a scene online at the level of objects given an RGB-D video sequence. While current object-aware neural implicit representations hold promise, they are limited in online reconstruction efficiency and shape completion. Our main contributions to alleviate the above limitations are twofold. First, we propose a feature grid interpolation mechanism to continuously update grid-based object-centric neural implicit representations as new object parts are revealed. Second, we construct an object library with previously mapped objects in advance and leverage the corresponding shape priors to initialize geometric object models in new videos, subsequently completing them with novel views as well as synthesized past views to avoid losing original object details. Extensive experiments on synthetic environments from the Replica dataset, real-world ScanNet sequences and videos captured in our laboratory demonstrate that our approach outperforms state-of-the-art neural implicit models for this task in terms of reconstruction accuracy and completeness.
Object Goal Navigation with Recursive Implicit Maps
Aug 10, 2023Object goal navigation aims to navigate an agent to locations of a given object category in unseen environments. Classical methods explicitly build maps of environments and require extensive engineering while lacking semantic information for object-oriented exploration. On the other hand, end-to-end learning methods alleviate manual map design and predict actions using implicit representations. Such methods, however, lack an explicit notion of geometry and may have limited ability to encode navigation history. In this work, we propose an implicit spatial map for object goal navigation. Our implicit map is recursively updated with new observations at each step using a transformer. To encourage spatial reasoning, we introduce auxiliary tasks and train our model to reconstruct explicit maps as well as to predict visual features, semantic labels and actions. Our method significantly outperforms the state of the art on the challenging MP3D dataset and generalizes well to the HM3D dataset. We successfully deploy our model on a real robot and achieve encouraging object goal navigation results in real scenes using only a few real-world demonstrations. Code, trained models and videos are available at \url{https://www.di.ens.fr/willow/research/onav_rim/}.
Assembly Planning from Observations under Physical Constraints
Apr 20, 2022
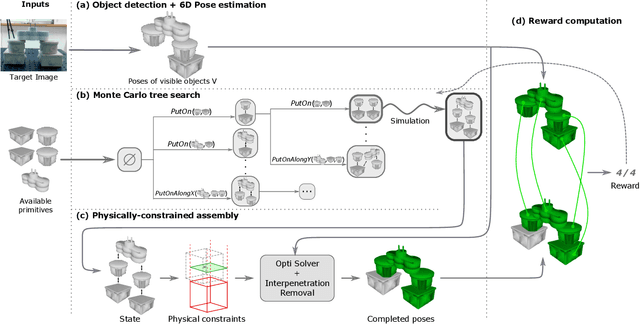

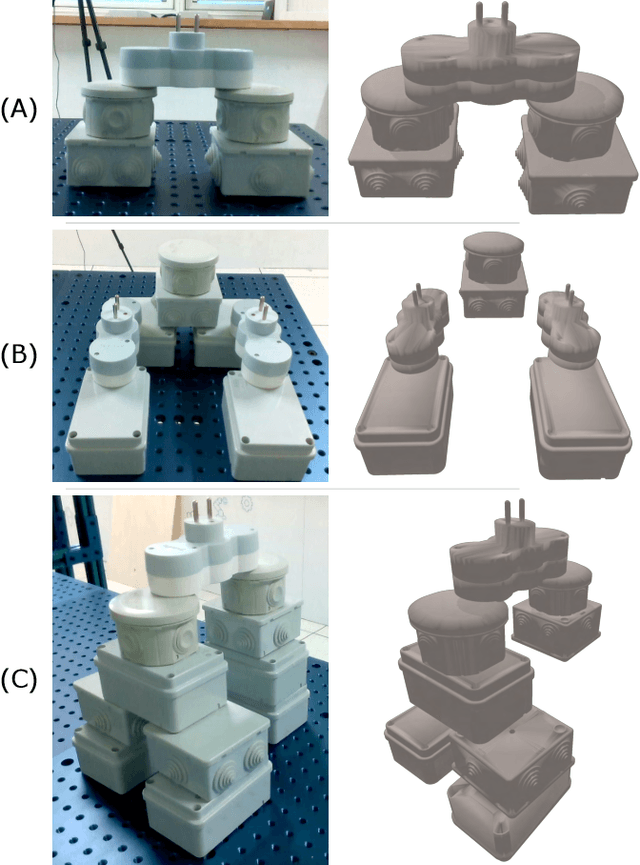
This paper addresses the problem of copying an unknown assembly of primitives with known shape and appearance using information extracted from a single photograph by an off-the-shelf procedure for object detection and pose estimation. The proposed algorithm uses a simple combination of physical stability constraints, convex optimization and Monte Carlo tree search to plan assemblies as sequences of pick-and-place operations represented by STRIPS operators. It is efficient and, most importantly, robust to the errors in object detection and pose estimation unavoidable in any real robotic system. The proposed approach is demonstrated with thorough experiments on a UR5 manipulator.