 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClique Analysis and Bypassing in Continuous-Time Conflict-Based Search
Dec 26, 2023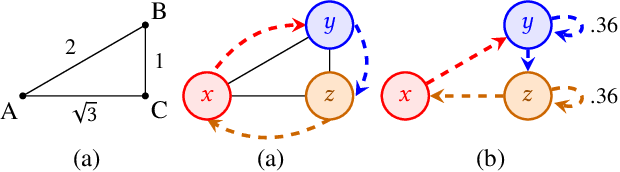
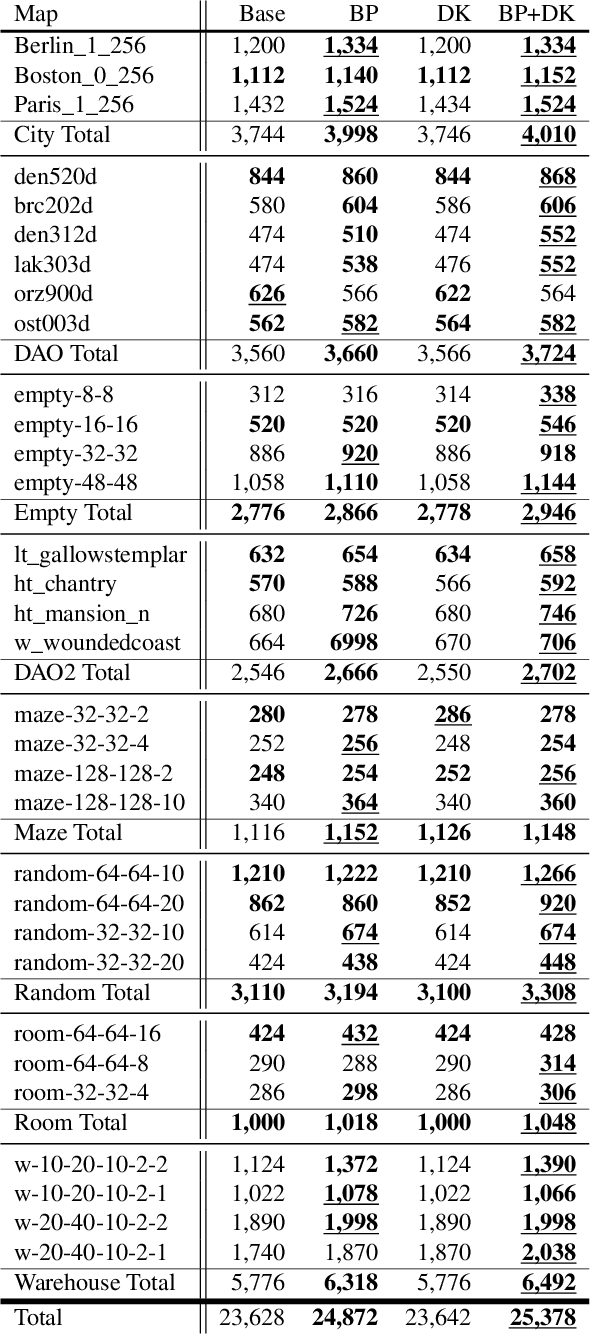
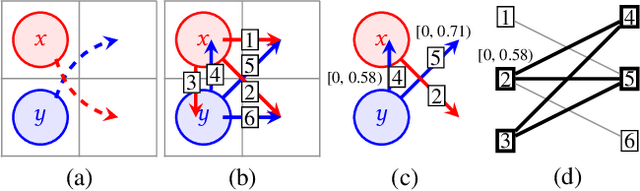
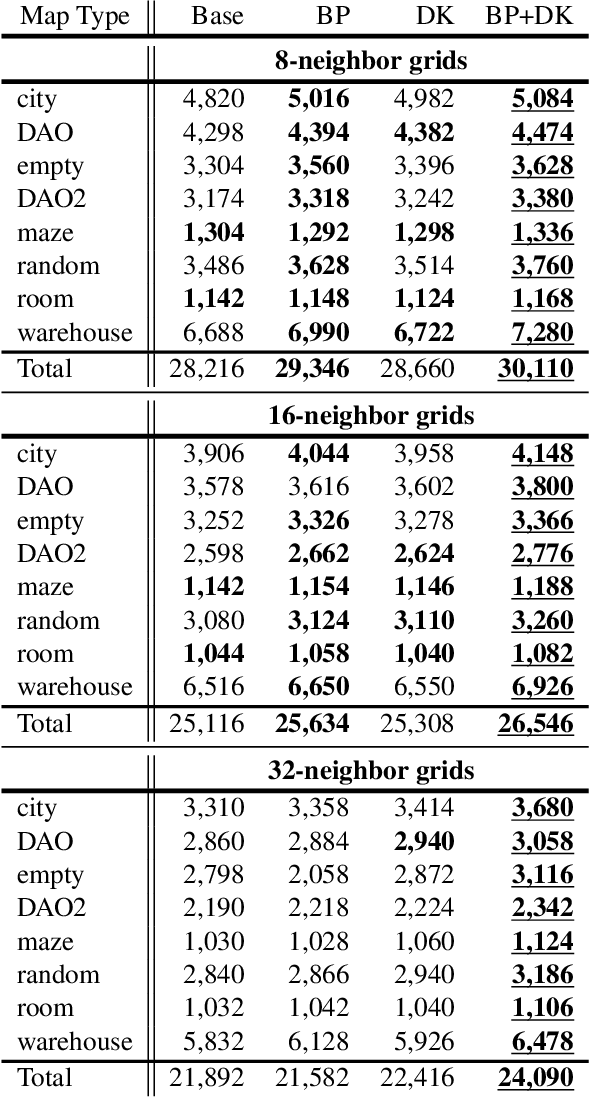
While the study of unit-cost Multi-Agent Pathfinding (MAPF) problems has been popular, many real-world problems require continuous time and costs due to various movement models. In this context, this paper studies symmetry-breaking enhancements for Continuous-Time Conflict-Based Search (CCBS), a solver for continuous-time MAPF. Resolving conflict symmetries in MAPF can require an exponential amount of work. We adapt known enhancements from unit-cost domains for CCBS: bypassing, which resolves cost symmetries and biclique constraints which resolve spatial conflict symmetries. We formulate a novel combination of biclique constraints with disjoint splitting for spatial conflict symmetries. Finally, we show empirically that these enhancements yield a statistically significant performance improvement versus previous state of the art, solving problems for up to 10% or 20% more agents in the same amount of time on dense graphs.
Hierarchical Reinforcement Learning for Air-to-Air Combat
May 03, 2021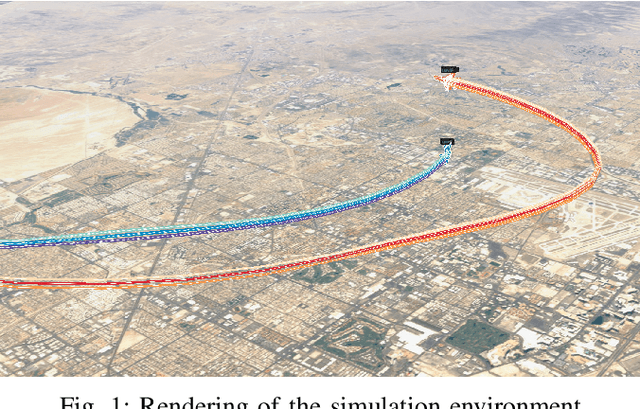
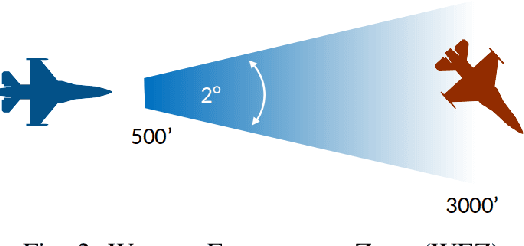
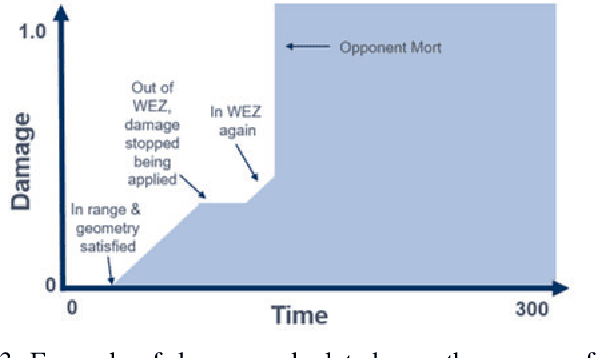
Artificial Intelligence (AI) is becoming a critical component in the defense industry, as recently demonstrated by DARPA`s AlphaDogfight Trials (ADT). ADT sought to vet the feasibility of AI algorithms capable of piloting an F-16 in simulated air-to-air combat. As a participant in ADT, Lockheed Martin`s (LM) approach combines a hierarchical architecture with maximum-entropy reinforcement learning (RL), integrates expert knowledge through reward shaping, and supports modularity of policies. This approach achieved a $2^{nd}$ place finish in the final ADT event (among eight total competitors) and defeated a graduate of the US Air Force's (USAF) F-16 Weapons Instructor Course in match play.