 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterpreting Context-Aware Human Preferences for Multi-Objective Robot Navigation
Mar 18, 2026Robots operating in human-shared environments must not only achieve task-level navigation objectives such as safety and efficiency, but also adapt their behavior to human preferences. However, as human preferences are typically expressed in natural language and depend on environmental context, it is difficult to directly integrate them into low-level robot control policies. In this work, we present a pipeline that enables robots to understand and apply context-dependent navigation preferences by combining foundational models with a Multi-Objective Reinforcement Learning (MORL) navigation policy. Thus, our approach integrates high-level semantic reasoning with low-level motion control. A Vision-Language Model (VLM) extracts structured environmental context from onboard visual observations, while Large Language Models (LLM) convert natural language user feedback into interpretable, context-dependent behavioral rules stored in a persistent but updatable rule memory. A preference translation module then maps contextual information and stored rules into numerical preference vectors that parameterize a pretrained MORL policy for real-time navigation adaptation. We evaluate the proposed framework through quantitative component-level evaluations, a user study, and real-world robot deployments in various indoor environments. Our results demonstrate that the system reliably captures user intent, generates consistent preference vectors, and enables controllable behavior adaptation across diverse contexts. Overall, the proposed pipeline improves the adaptability, transparency, and usability of robots operating in shared human environments, while maintaining safe and responsive real-time control.
Learning Adaptive Multi-Objective Robot Navigation with Demonstrations
Apr 12, 2024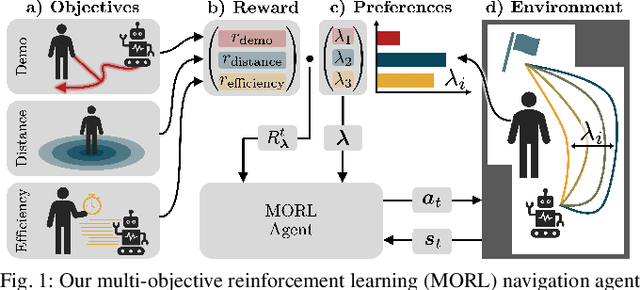
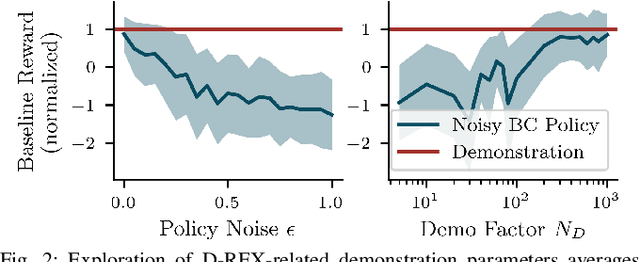
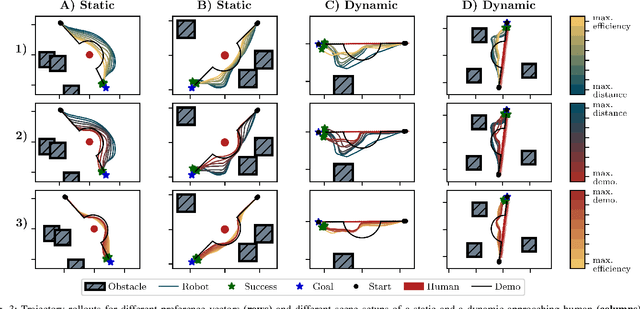
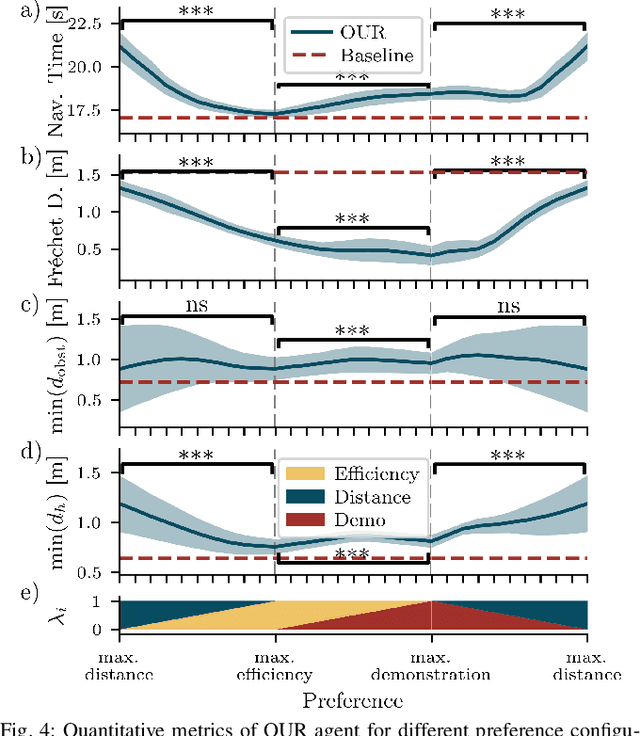
Preference-aligned robot navigation in human environments is typically achieved through learning-based approaches, utilizing demonstrations and user feedback for personalization. However, personal preferences are subject to change and might even be context-dependent. Yet traditional reinforcement learning (RL) approaches with a static reward function often fall short in adapting to these varying user preferences. This paper introduces a framework that combines multi-objective reinforcement learning (MORL) with demonstration-based learning. Our approach allows for dynamic adaptation to changing user preferences without retraining. Through rigorous evaluations, including sim-to-real and robot-to-robot transfers, we demonstrate our framework's capability to reflect user preferences accurately while achieving high navigational performance in terms of collision avoidance and goal pursuance.
Spatiotemporal Attention Enhances Lidar-Based Robot Navigation in Dynamic Environments
Oct 30, 2023Foresighted robot navigation in dynamic indoor environments with cost-efficient hardware necessitates the use of a lightweight yet dependable controller. So inferring the scene dynamics from sensor readings without explicit object tracking is a pivotal aspect of foresighted navigation among pedestrians. In this paper, we introduce a spatiotemporal attention pipeline for enhanced navigation based on 2D lidar sensor readings. This pipeline is complemented by a novel lidar-state representation that emphasizes dynamic obstacles over static ones. Subsequently, the attention mechanism enables selective scene perception across both space and time, resulting in improved overall navigation performance within dynamic scenarios. We thoroughly evaluated the approach in different scenarios and simulators, finding good generalization to unseen environments. The results demonstrate outstanding performance compared to state-of-the-art methods, thereby enabling the seamless deployment of the learned controller on a real robot.