 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatiotemporal Attention Enhances Lidar-Based Robot Navigation in Dynamic Environments
Oct 30, 2023Foresighted robot navigation in dynamic indoor environments with cost-efficient hardware necessitates the use of a lightweight yet dependable controller. So inferring the scene dynamics from sensor readings without explicit object tracking is a pivotal aspect of foresighted navigation among pedestrians. In this paper, we introduce a spatiotemporal attention pipeline for enhanced navigation based on 2D lidar sensor readings. This pipeline is complemented by a novel lidar-state representation that emphasizes dynamic obstacles over static ones. Subsequently, the attention mechanism enables selective scene perception across both space and time, resulting in improved overall navigation performance within dynamic scenarios. We thoroughly evaluated the approach in different scenarios and simulators, finding good generalization to unseen environments. The results demonstrate outstanding performance compared to state-of-the-art methods, thereby enabling the seamless deployment of the learned controller on a real robot.
Subgoal-Driven Navigation in Dynamic Environments Using Attention-Based Deep Reinforcement Learning
Mar 02, 2023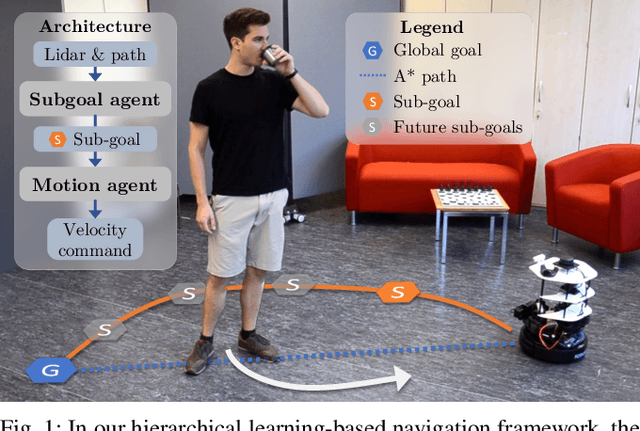
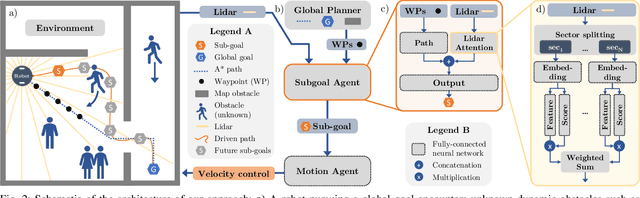
Collision-free, goal-directed navigation in environments containing unknown static and dynamic obstacles is still a great challenge, especially when manual tuning of navigation policies or costly motion prediction needs to be avoided. In this paper, we therefore propose a subgoal-driven hierarchical navigation architecture that is trained with deep reinforcement learning and decouples obstacle avoidance and motor control. In particular, we separate the navigation task into the prediction of the next subgoal position for avoiding collisions while moving toward the final target position, and the prediction of the robot's velocity controls. By relying on 2D lidar, our method learns to avoid obstacles while still achieving goal-directed behavior as well as to generate low-level velocity control commands to reach the subgoals. In our architecture, we apply the attention mechanism on the robot's 2D lidar readings and compute the importance of lidar scan segments for avoiding collisions. As we show in simulated and real-world experiments with a Turtlebot robot, our proposed method leads to smooth and safe trajectories among humans and significantly outperforms a state-of-the-art approach in terms of success rate. A supplemental video describing our approach is available online.