 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBi-LAT: Bilateral Control-Based Imitation Learning via Natural Language and Action Chunking with Transformers
Apr 02, 2025We present Bi-LAT, a novel imitation learning framework that unifies bilateral control with natural language processing to achieve precise force modulation in robotic manipulation. Bi-LAT leverages joint position, velocity, and torque data from leader-follower teleoperation while also integrating visual and linguistic cues to dynamically adjust applied force. By encoding human instructions such as "softly grasp the cup" or "strongly twist the sponge" through a multimodal Transformer-based model, Bi-LAT learns to distinguish nuanced force requirements in real-world tasks. We demonstrate Bi-LAT's performance in (1) unimanual cup-stacking scenario where the robot accurately modulates grasp force based on language commands, and (2) bimanual sponge-twisting task that requires coordinated force control. Experimental results show that Bi-LAT effectively reproduces the instructed force levels, particularly when incorporating SigLIP among tested language encoders. Our findings demonstrate the potential of integrating natural language cues into imitation learning, paving the way for more intuitive and adaptive human-robot interaction. For additional material, please visit: https://mertcookimg.github.io/bi-lat/
ALPHA-$α$ and Bi-ACT Are All You Need: Importance of Position and Force Information/Control for Imitation Learning of Unimanual and Bimanual Robotic Manipulation with Low-Cost System
Nov 15, 2024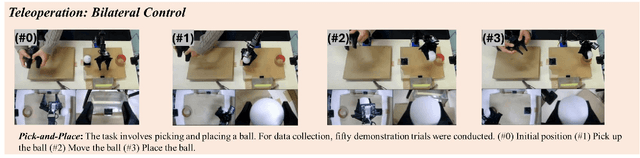
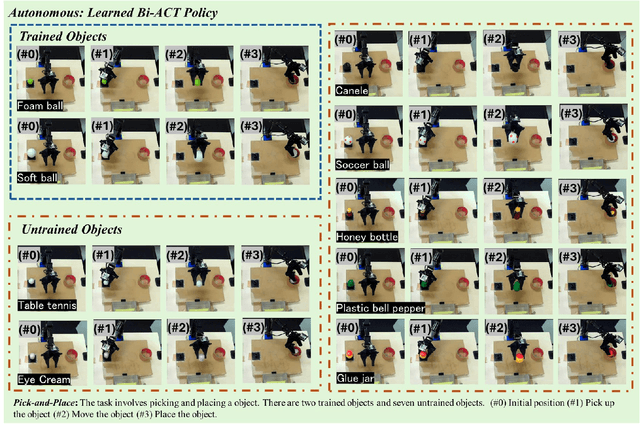
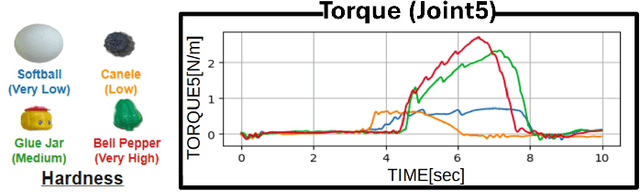
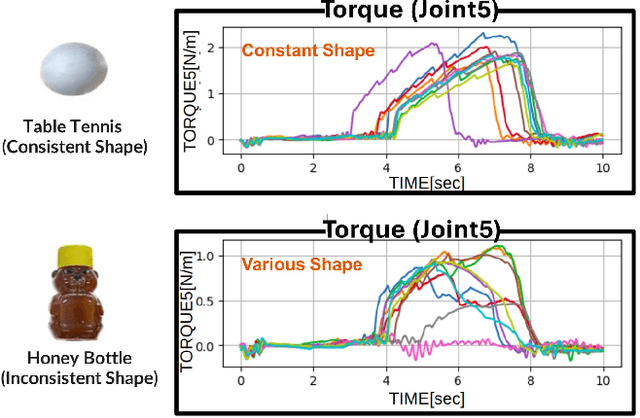
Autonomous manipulation in everyday tasks requires flexible action generation to handle complex, diverse real-world environments, such as objects with varying hardness and softness. Imitation Learning (IL) enables robots to learn complex tasks from expert demonstrations. However, a lot of existing methods rely on position/unilateral control, leaving challenges in tasks that require force information/control, like carefully grasping fragile or varying-hardness objects. As the need for diverse controls increases, there are demand for low-cost bimanual robots that consider various motor inputs. To address these challenges, we introduce Bilateral Control-Based Imitation Learning via Action Chunking with Transformers(Bi-ACT) and"A" "L"ow-cost "P"hysical "Ha"rdware Considering Diverse Motor Control Modes for Research in Everyday Bimanual Robotic Manipulation (ALPHA-$\alpha$). Bi-ACT leverages bilateral control to utilize both position and force information, enhancing the robot's adaptability to object characteristics such as hardness, shape, and weight. The concept of ALPHA-$\alpha$ is affordability, ease of use, repairability, ease of assembly, and diverse control modes (position, velocity, torque), allowing researchers/developers to freely build control systems using ALPHA-$\alpha$. In our experiments, we conducted a detailed analysis of Bi-ACT in unimanual manipulation tasks, confirming its superior performance and adaptability compared to Bi-ACT without force control. Based on these results, we applied Bi-ACT to bimanual manipulation tasks. Experimental results demonstrated high success rates in coordinated bimanual operations across multiple tasks. The effectiveness of the Bi-ACT and ALPHA-$\alpha$ can be seen through comprehensive real-world experiments. Video available at: https://mertcookimg.github.io/alpha-biact/
DABI: Evaluation of Data Augmentation Methods Using Downsampling in Bilateral Control-Based Imitation Learning with Images
Oct 06, 2024



Autonomous robot manipulation is a complex and continuously evolving robotics field. This paper focuses on data augmentation methods in imitation learning. Imitation learning consists of three stages: data collection from experts, learning model, and execution. However, collecting expert data requires manual effort and is time-consuming. Additionally, as sensors have different data acquisition intervals, preprocessing such as downsampling to match the lowest frequency is necessary. Downsampling enables data augmentation and also contributes to the stabilization of robot operations. In light of this background, this paper proposes the Data Augmentation Method for Bilateral Control-Based Imitation Learning with Images, called "DABI". DABI collects robot joint angles, velocities, and torques at 1000 Hz, and uses images from gripper and environmental cameras captured at 100 Hz as the basis for data augmentation. This enables a tenfold increase in data. In this paper, we collected just 5 expert demonstration datasets. We trained the bilateral control Bi-ACT model with the unaltered dataset and two augmentation methods for comparative experiments and conducted real-world experiments. The results confirmed a significant improvement in success rates, thereby proving the effectiveness of DABI. For additional material, please check https://mertcookimg.github.io/dabi
ILBiT: Imitation Learning for Robot Using Position and Torque Information based on Bilateral Control with Transformer
Feb 05, 2024Autonomous manipulation in robot arms is a complex and evolving field of study in robotics. This paper introduces an innovative approach to this challenge by focusing on imitation learning (IL). Unlike traditional imitation methods, our approach uses IL based on bilateral control, allowing for more precise and adaptable robot movements. The conventional IL based on bilateral control method have relied on Long Short-Term Memory (LSTM) networks. In this paper, we present the IL for robot using position and torque information based on Bilateral control with Transformer (ILBiT). This proposed method employs the Transformer model, known for its robust performance in handling diverse datasets and its capability to surpass LSTM's limitations, especially in tasks requiring detailed force adjustments. A standout feature of ILBiT is its high-frequency operation at 100 Hz, which significantly improves the system's adaptability and response to varying environments and objects of different hardness levels. The effectiveness of the Transformer-based ILBiT method can be seen through comprehensive real-world experiments.
Bi-ACT: Bilateral Control-Based Imitation Learning via Action Chunking with Transformer
Jan 31, 2024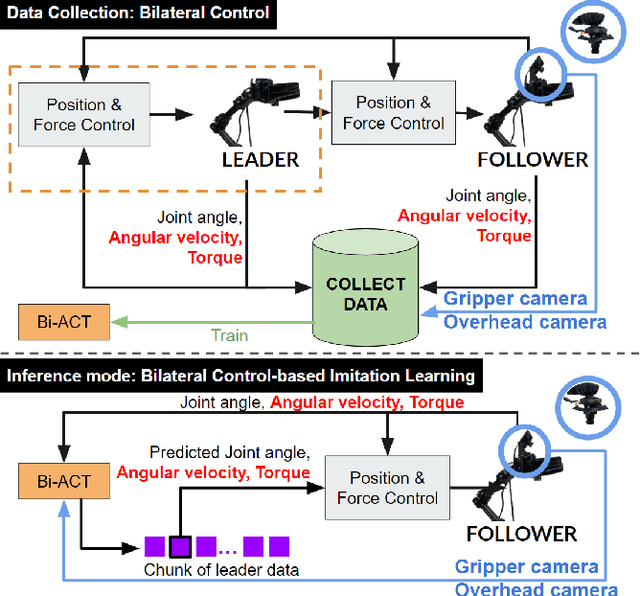
Autonomous manipulation in robot arms is a complex and evolving field of study in robotics. This paper proposes work stands at the intersection of two innovative approaches in the field of robotics and machine learning. Inspired by the Action Chunking with Transformer (ACT) model, which employs joint location and image data to predict future movements, our work integrates principles of Bilateral Control-Based Imitation Learning to enhance robotic control. Our objective is to synergize these techniques, thereby creating a more robust and efficient control mechanism. In our approach, the data collected from the environment are images from the gripper and overhead cameras, along with the joint angles, angular velocities, and forces of the follower robot using bilateral control. The model is designed to predict the subsequent steps for the joint angles, angular velocities, and forces of the leader robot. This predictive capability is crucial for implementing effective bilateral control in the follower robot, allowing for more nuanced and responsive maneuvering.