 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBi-ACT: Bilateral Control-Based Imitation Learning via Action Chunking with Transformer
Paper and Code
Jan 31, 2024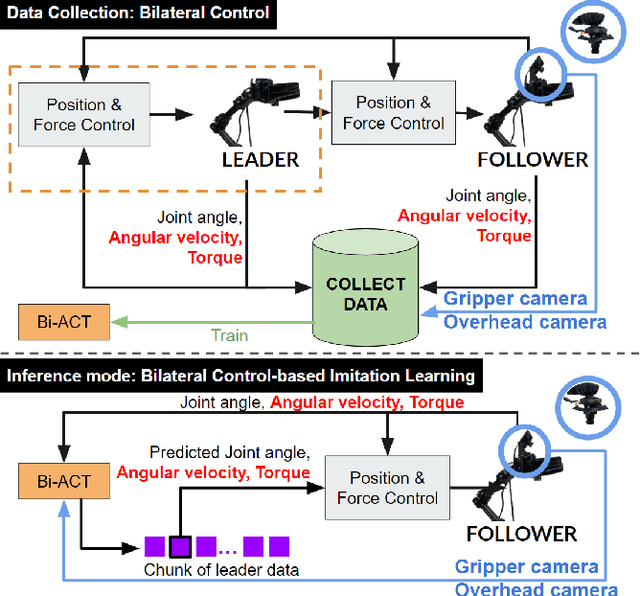
Autonomous manipulation in robot arms is a complex and evolving field of study in robotics. This paper proposes work stands at the intersection of two innovative approaches in the field of robotics and machine learning. Inspired by the Action Chunking with Transformer (ACT) model, which employs joint location and image data to predict future movements, our work integrates principles of Bilateral Control-Based Imitation Learning to enhance robotic control. Our objective is to synergize these techniques, thereby creating a more robust and efficient control mechanism. In our approach, the data collected from the environment are images from the gripper and overhead cameras, along with the joint angles, angular velocities, and forces of the follower robot using bilateral control. The model is designed to predict the subsequent steps for the joint angles, angular velocities, and forces of the leader robot. This predictive capability is crucial for implementing effective bilateral control in the follower robot, allowing for more nuanced and responsive maneuvering.