 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFine-Grained Open-Vocabulary Object Detection with Fined-Grained Prompts: Task, Dataset and Benchmark
Mar 20, 2025Open-vocabulary detectors are proposed to locate and recognize objects in novel classes. However, variations in vision-aware language vocabulary data used for open-vocabulary learning can lead to unfair and unreliable evaluations. Recent evaluation methods have attempted to address this issue by incorporating object properties or adding locations and characteristics to the captions. Nevertheless, since these properties and locations depend on the specific details of the images instead of classes, detectors can not make accurate predictions without precise descriptions provided through human annotation. This paper introduces 3F-OVD, a novel task that extends supervised fine-grained object detection to the open-vocabulary setting. Our task is intuitive and challenging, requiring a deep understanding of Fine-grained captions and careful attention to Fine-grained details in images in order to accurately detect Fine-grained objects. Additionally, due to the scarcity of qualified fine-grained object detection datasets, we have created a new dataset, NEU-171K, tailored for both supervised and open-vocabulary settings. We benchmark state-of-the-art object detectors on our dataset for both settings. Furthermore, we propose a simple yet effective post-processing technique.
Bridged Transformer for Vision and Point Cloud 3D Object Detection
Oct 04, 2022
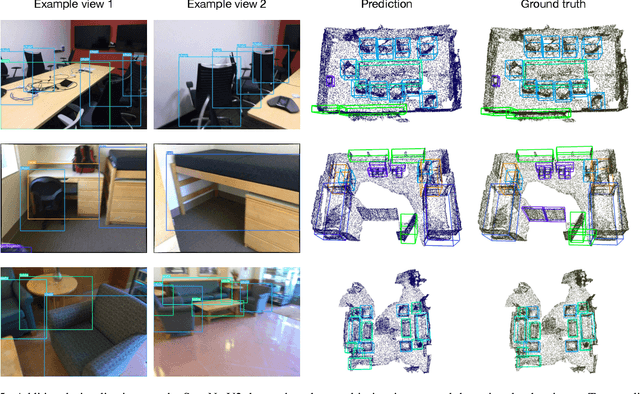

3D object detection is a crucial research topic in computer vision, which usually uses 3D point clouds as input in conventional setups. Recently, there is a trend of leveraging multiple sources of input data, such as complementing the 3D point cloud with 2D images that often have richer color and fewer noises. However, due to the heterogeneous geometrics of the 2D and 3D representations, it prevents us from applying off-the-shelf neural networks to achieve multimodal fusion. To that end, we propose Bridged Transformer (BrT), an end-to-end architecture for 3D object detection. BrT is simple and effective, which learns to identify 3D and 2D object bounding boxes from both points and image patches. A key element of BrT lies in the utilization of object queries for bridging 3D and 2D spaces, which unifies different sources of data representations in Transformer. We adopt a form of feature aggregation realized by point-to-patch projections which further strengthen the correlations between images and points. Moreover, BrT works seamlessly for fusing the point cloud with multi-view images. We experimentally show that BrT surpasses state-of-the-art methods on SUN RGB-D and ScanNetV2 datasets.