 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhyPlan: Compositional and Adaptive Physical Task Reasoning with Physics-Informed Skill Networks for Robot Manipulators
Feb 24, 2024



Given the task of positioning a ball-like object to a goal region beyond direct reach, humans can often throw, slide, or rebound objects against the wall to attain the goal. However, enabling robots to reason similarly is non-trivial. Existing methods for physical reasoning are data-hungry and struggle with complexity and uncertainty inherent in the real world. This paper presents PhyPlan, a novel physics-informed planning framework that combines physics-informed neural networks (PINNs) with modified Monte Carlo Tree Search (MCTS) to enable embodied agents to perform dynamic physical tasks. PhyPlan leverages PINNs to simulate and predict outcomes of actions in a fast and accurate manner and uses MCTS for planning. It dynamically determines whether to consult a PINN-based simulator (coarse but fast) or engage directly with the actual environment (fine but slow) to determine optimal policy. Evaluation with robots in simulated 3D environments demonstrates the ability of our approach to solve 3D-physical reasoning tasks involving the composition of dynamic skills. Quantitatively, PhyPlan excels in several aspects: (i) it achieves lower regret when learning novel tasks compared to state-of-the-art, (ii) it expedites skill learning and enhances the speed of physical reasoning, (iii) it demonstrates higher data efficiency compared to a physics un-informed approach.
From Forks to Forceps: A New Framework for Instance Segmentation of Surgical Instruments
Nov 26, 2022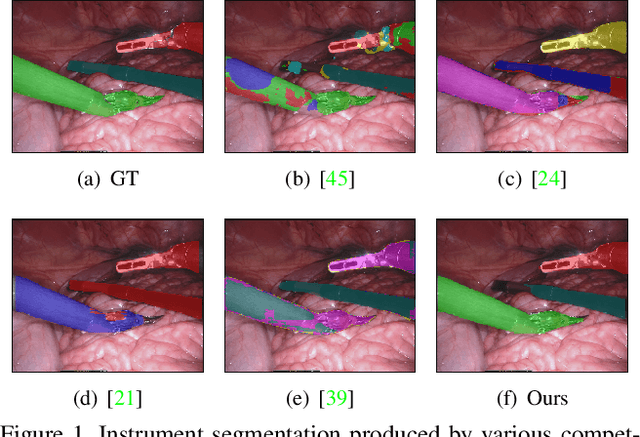
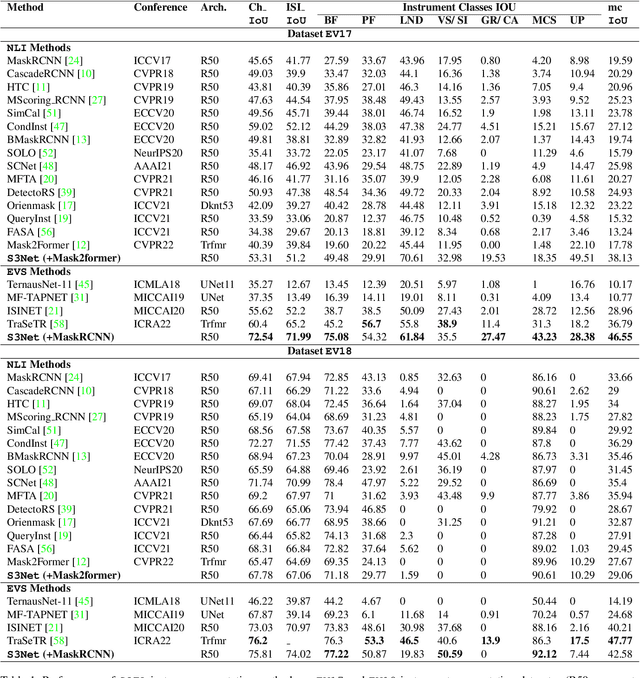
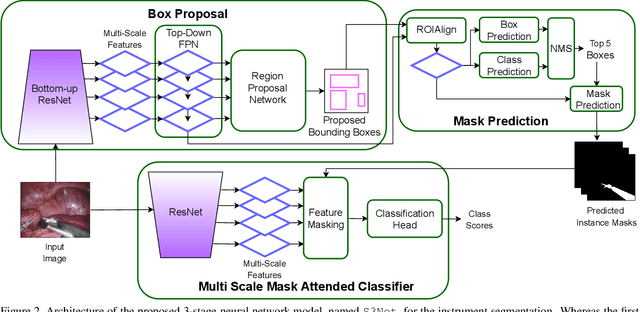
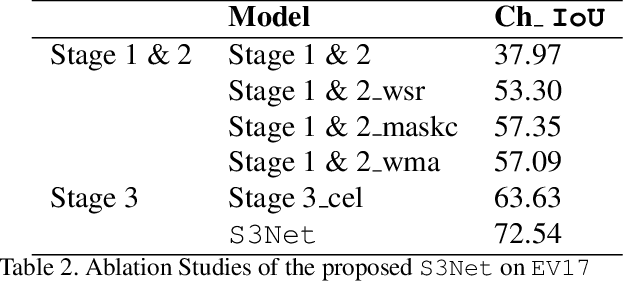
Minimally invasive surgeries and related applications demand surgical tool classification and segmentation at the instance level. Surgical tools are similar in appearance and are long, thin, and handled at an angle. The fine-tuning of state-of-the-art (SOTA) instance segmentation models trained on natural images for instrument segmentation has difficulty discriminating instrument classes. Our research demonstrates that while the bounding box and segmentation mask are often accurate, the classification head mis-classifies the class label of the surgical instrument. We present a new neural network framework that adds a classification module as a new stage to existing instance segmentation models. This module specializes in improving the classification of instrument masks generated by the existing model. The module comprises multi-scale mask attention, which attends to the instrument region and masks the distracting background features. We propose training our classifier module using metric learning with arc loss to handle low inter-class variance of surgical instruments. We conduct exhaustive experiments on the benchmark datasets EndoVis2017 and EndoVis2018. We demonstrate that our method outperforms all (more than 18) SOTA methods compared with, and improves the SOTA performance by at least 12 points (20%) on the EndoVis2017 benchmark challenge and generalizes effectively across the datasets.
Person Re-Identification
Apr 27, 2022
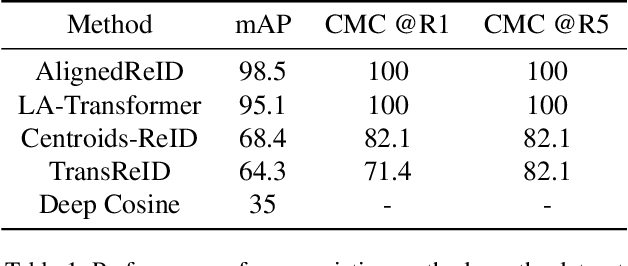
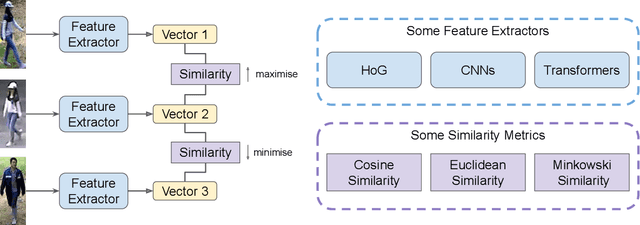
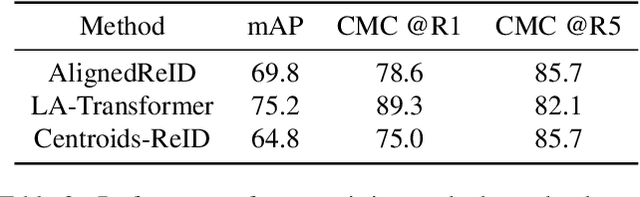
Person Re-Identification (Re-ID) is an important problem in computer vision-based surveillance applications, in which one aims to identify a person across different surveillance photographs taken from different cameras having varying orientations and field of views. Due to the increasing demand for intelligent video surveillance, Re-ID has gained significant interest in the computer vision community. In this work, we experiment on some existing Re-ID methods that obtain state of the art performance in some open benchmarks. We qualitatively and quantitaively analyse their performance on a provided dataset, and then propose methods to improve the results. This work was the report submitted for COL780 final project at IIT Delhi.