 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Sim-to-Real Industrial Parts Classification with Synthetic Dataset
Apr 12, 2024



This paper is about effectively utilizing synthetic data for training deep neural networks for industrial parts classification, in particular, by taking into account the domain gap against real-world images. To this end, we introduce a synthetic dataset that may serve as a preliminary testbed for the Sim-to-Real challenge; it contains 17 objects of six industrial use cases, including isolated and assembled parts. A few subsets of objects exhibit large similarities in shape and albedo for reflecting challenging cases of industrial parts. All the sample images come with and without random backgrounds and post-processing for evaluating the importance of domain randomization. We call it Synthetic Industrial Parts dataset (SIP-17). We study the usefulness of SIP-17 through benchmarking the performance of five state-of-the-art deep network models, supervised and self-supervised, trained only on the synthetic data while testing them on real data. By analyzing the results, we deduce some insights on the feasibility and challenges of using synthetic data for industrial parts classification and for further developing larger-scale synthetic datasets. Our dataset and code are publicly available.
* Published in 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW)
D-OccNet: Detailed 3D Reconstruction Using Cross-Domain Learning
Apr 28, 2021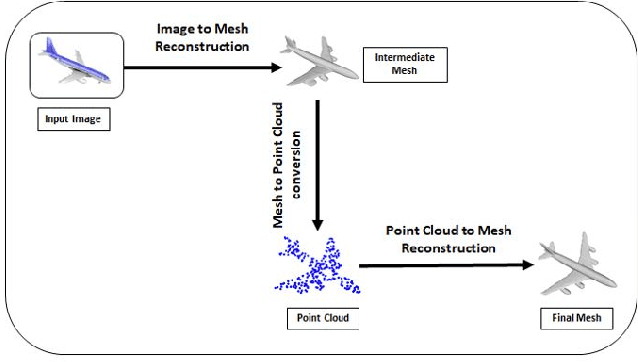



Deep learning based 3D reconstruction of single view 2D image is becoming increasingly popular due to their wide range of real-world applications, but this task is inherently challenging because of the partial observability of an object from a single perspective. Recently, state of the art probability based Occupancy Networks reconstructed 3D surfaces from three different types of input domains: single view 2D image, point cloud and voxel. In this study, we extend the work on Occupancy Networks by exploiting cross-domain learning of image and point cloud domains. Specifically, we first convert the single view 2D image into a simpler point cloud representation, and then reconstruct a 3D surface from it. Our network, the Double Occupancy Network (D-OccNet) outperforms Occupancy Networks in terms of visual quality and details captured in the 3D reconstruction.