 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeD-OccNet: Detailed 3D Reconstruction Using Cross-Domain Learning
Apr 28, 2021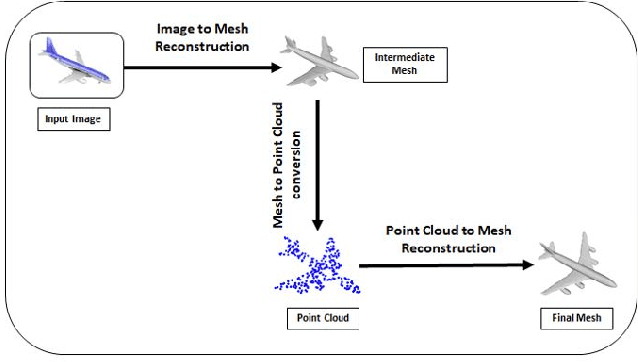



Deep learning based 3D reconstruction of single view 2D image is becoming increasingly popular due to their wide range of real-world applications, but this task is inherently challenging because of the partial observability of an object from a single perspective. Recently, state of the art probability based Occupancy Networks reconstructed 3D surfaces from three different types of input domains: single view 2D image, point cloud and voxel. In this study, we extend the work on Occupancy Networks by exploiting cross-domain learning of image and point cloud domains. Specifically, we first convert the single view 2D image into a simpler point cloud representation, and then reconstruct a 3D surface from it. Our network, the Double Occupancy Network (D-OccNet) outperforms Occupancy Networks in terms of visual quality and details captured in the 3D reconstruction.