 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGoal-directed Planning and Goal Understanding by Active Inference: Evaluation Through Simulated and Physical Robot Experiments
Feb 21, 2022

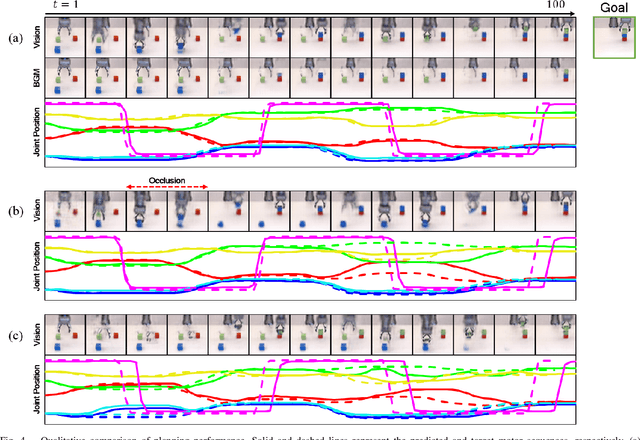
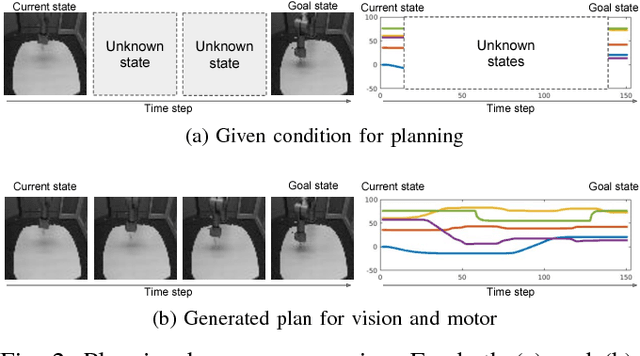
We show that goal-directed action planning and generation in a teleological framework can be formulated using the free energy principle. The proposed model, which is built on a variational recurrent neural network model, is characterized by three essential features. These are that (1) goals can be specified for both static sensory states, e.g., for goal images to be reached and dynamic processes, e.g., for moving around an object, (2) the model can not only generate goal-directed action plans, but can also understand goals by sensory observation, and (3) the model generates future action plans for given goals based on the best estimate of the current state, inferred using past sensory observations. The proposed model is evaluated by conducting experiments on a simulated mobile agent as well as on a real humanoid robot performing object manipulation.
Goal-Directed Planning for Habituated Agents by Active Inference Using a Variational Recurrent Neural Network
May 27, 2020



It is crucial to ask how agents can achieve goals by generating action plans using only partial models of the world acquired through habituated sensory-motor experiences. Although many existing robotics studies use a forward model framework, there are generalization issues with high degrees of freedom. The current study shows that the predictive coding (PC) and active inference (AIF) frameworks, which employ a generative model, can develop better generalization by learning a prior distribution in a low dimensional latent state space representing probabilistic structures extracted from well habituated sensory-motor trajectories. In our proposed model, learning is carried out by inferring optimal latent variables as well as synaptic weights for maximizing the evidence lower bound, while goal-directed planning is accomplished by inferring latent variables for maximizing the estimated lower bound. Our proposed model was evaluated with both simple and complex robotic tasks in simulation, which demonstrated sufficient generalization in learning with limited training data by setting an intermediate value for a regularization coefficient. Furthermore, comparative simulation results show that the proposed model outperforms a conventional forward model in goal-directed planning, due to the learned prior confining the search of motor plans within the range of habituated trajectories.
* 30 pages, 19 figures
Goal-Directed Behavior under Variational Predictive Coding: Dynamic Organization of Visual Attention and Working Memory
Mar 12, 2019
Mental simulation is a critical cognitive function for goal-directed behavior because it is essential for assessing actions and their consequences. When a self-generated or externally specified goal is given, a sequence of actions that is most likely to attain that goal is selected among other candidates via mental simulation. Therefore, better mental simulation leads to better goal-directed action planning. However, developing a mental simulation model is challenging because it requires knowledge of self and the environment. The current paper studies how adequate goal-directed action plans of robots can be mentally generated by dynamically organizing top-down visual attention and visual working memory. For this purpose, we propose a neural network model based on variational Bayes predictive coding, where goal-directed action planning is formulated by Bayesian inference of latent intentional space. Our experimental results showed that cognitively meaningful competencies, such as autonomous top-down attention to the robot end effector (its hand) as well as dynamic organization of occlusion-free visual working memory, emerged. Furthermore, our analysis of comparative experiments indicated that introduction of visual working memory and the inference mechanism using variational Bayes predictive coding significantly improve the performance in planning adequate goal-directed actions.
Generating Goal-Directed Visuomotor Plans Based on Learning Using a Predictive Coding-type Deep Visuomotor Recurrent Neural Network Model
Jun 05, 2018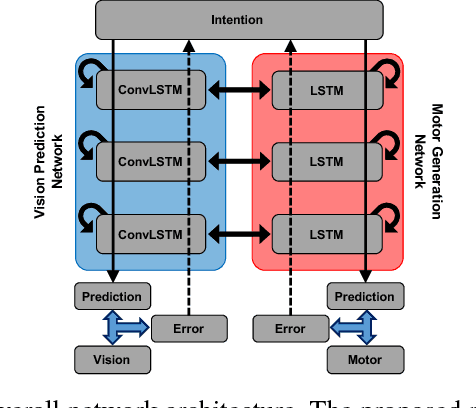

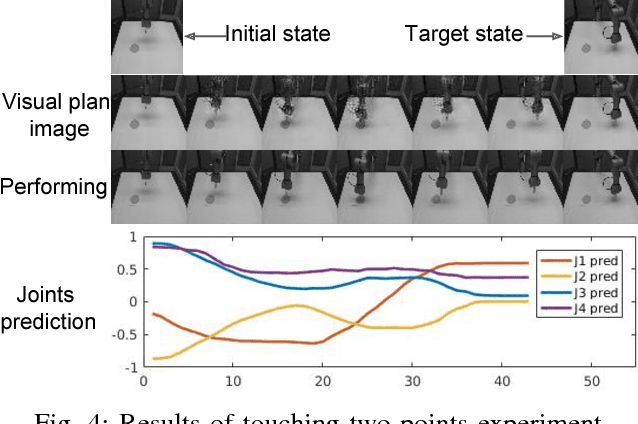
The current paper presents how a predictive coding type deep recurrent neural networks can generate vision-based goal-directed plans based on prior learning experience by examining experiment results using a real arm robot. The proposed deep recurrent neural network learns to predict visuo-proprioceptive sequences by extracting an adequate predictive model from various visuomotor experiences related to object-directed behaviors. The predictive model was developed in terms of mapping from intention state space to expected visuo-proprioceptive sequences space through iterative learning. Our arm robot experiments adopted with three different tasks with different levels of difficulty showed that the error minimization principle in the predictive coding framework applied to inference of the optimal intention states for given goal states can generate goal-directed plans even for unlearned goal states with generalization. It was, however, shown that sufficient generalization requires relatively large number of learning trajectories. The paper discusses possible countermeasure to overcome this problem.