 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGoal-Directed Behavior under Variational Predictive Coding: Dynamic Organization of Visual Attention and Working Memory
Paper and Code
Mar 12, 2019
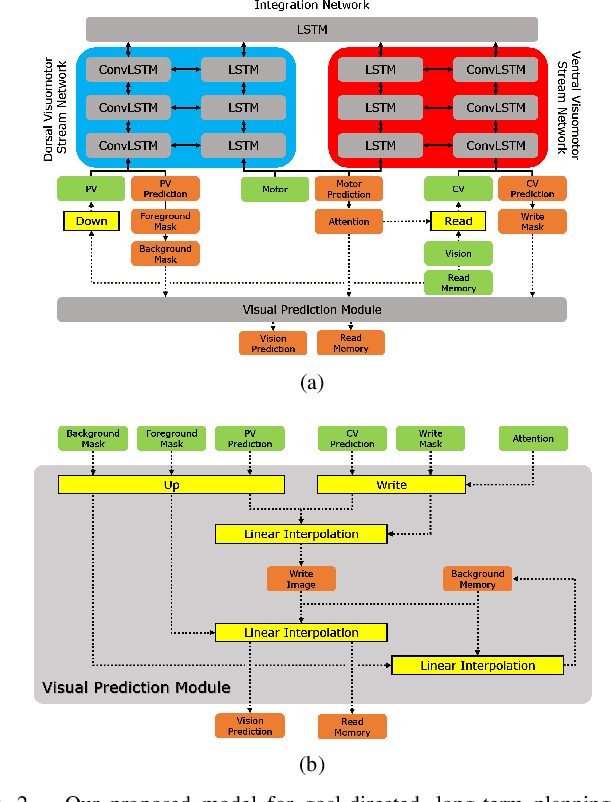
Mental simulation is a critical cognitive function for goal-directed behavior because it is essential for assessing actions and their consequences. When a self-generated or externally specified goal is given, a sequence of actions that is most likely to attain that goal is selected among other candidates via mental simulation. Therefore, better mental simulation leads to better goal-directed action planning. However, developing a mental simulation model is challenging because it requires knowledge of self and the environment. The current paper studies how adequate goal-directed action plans of robots can be mentally generated by dynamically organizing top-down visual attention and visual working memory. For this purpose, we propose a neural network model based on variational Bayes predictive coding, where goal-directed action planning is formulated by Bayesian inference of latent intentional space. Our experimental results showed that cognitively meaningful competencies, such as autonomous top-down attention to the robot end effector (its hand) as well as dynamic organization of occlusion-free visual working memory, emerged. Furthermore, our analysis of comparative experiments indicated that introduction of visual working memory and the inference mechanism using variational Bayes predictive coding significantly improve the performance in planning adequate goal-directed actions.