 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject Segmentation from Open-Vocabulary Manipulation Instructions Based on Optimal Transport Polygon Matching with Multimodal Foundation Models
Jul 01, 2024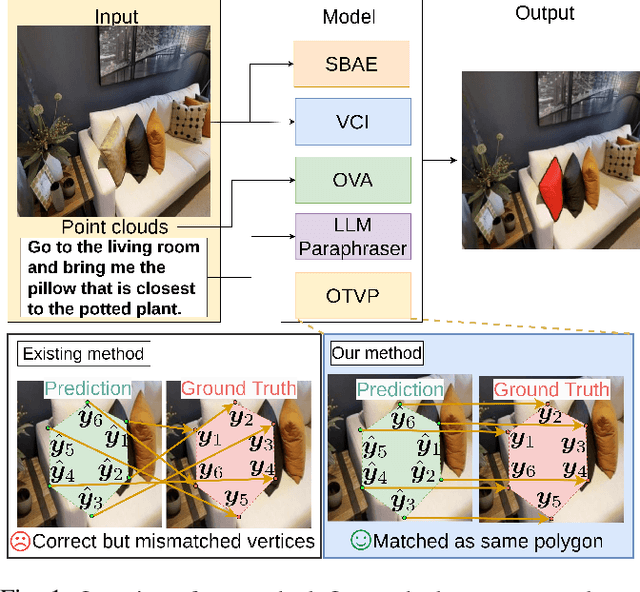
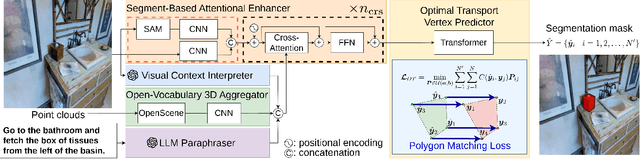
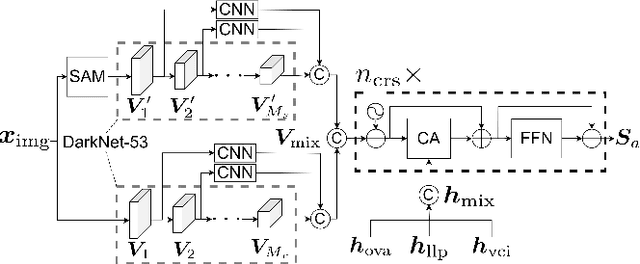
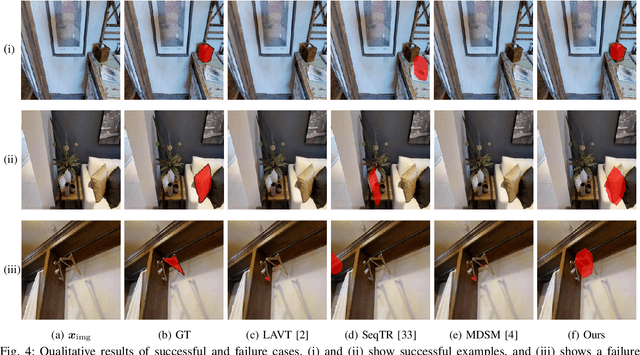
We consider the task of generating segmentation masks for the target object from an object manipulation instruction, which allows users to give open vocabulary instructions to domestic service robots. Conventional segmentation generation approaches often fail to account for objects outside the camera's field of view and cases in which the order of vertices differs but still represents the same polygon, which leads to erroneous mask generation. In this study, we propose a novel method that generates segmentation masks from open vocabulary instructions. We implement a novel loss function using optimal transport to prevent significant loss where the order of vertices differs but still represents the same polygon. To evaluate our approach, we constructed a new dataset based on the REVERIE dataset and Matterport3D dataset. The results demonstrated the effectiveness of the proposed method compared with existing mask generation methods. Remarkably, our best model achieved a +16.32% improvement on the dataset compared with a representative polygon-based method.
DialMAT: Dialogue-Enabled Transformer with Moment-Based Adversarial Training
Nov 12, 2023This paper focuses on the DialFRED task, which is the task of embodied instruction following in a setting where an agent can actively ask questions about the task. To address this task, we propose DialMAT. DialMAT introduces Moment-based Adversarial Training, which incorporates adversarial perturbations into the latent space of language, image, and action. Additionally, it introduces a crossmodal parallel feature extraction mechanism that applies foundation models to both language and image. We evaluated our model using a dataset constructed from the DialFRED dataset and demonstrated superior performance compared to the baseline method in terms of success rate and path weighted success rate. The model secured the top position in the DialFRED Challenge, which took place at the CVPR 2023 Embodied AI workshop.