 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHypernetwork-based approach for optimal composition design in partially controlled multi-agent systems
Feb 18, 2025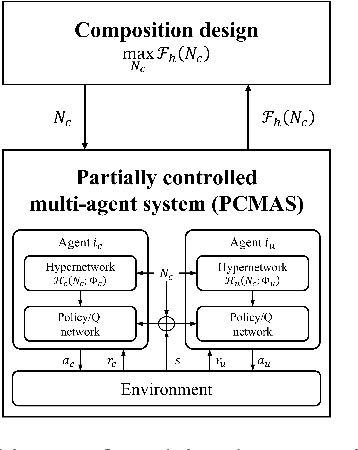

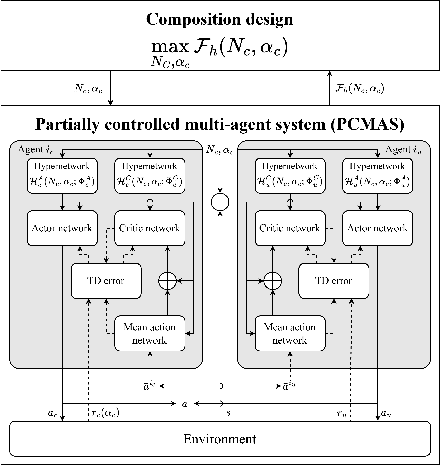
Partially Controlled Multi-Agent Systems (PCMAS) are comprised of controllable agents, managed by a system designer, and uncontrollable agents, operating autonomously. This study addresses an optimal composition design problem in PCMAS, which involves the system designer's problem, determining the optimal number and policies of controllable agents, and the uncontrollable agents' problem, identifying their best-response policies. Solving this bi-level optimization problem is computationally intensive, as it requires repeatedly solving multi-agent reinforcement learning problems under various compositions for both types of agents. To address these challenges, we propose a novel hypernetwork-based framework that jointly optimizes the system's composition and agent policies. Unlike traditional methods that train separate policy networks for each composition, the proposed framework generates policies for both controllable and uncontrollable agents through a unified hypernetwork. This approach enables efficient information sharing across similar configurations, thereby reducing computational overhead. Additional improvements are achieved by incorporating reward parameter optimization and mean action networks. Using real-world New York City taxi data, we demonstrate that our framework outperforms existing methods in approximating equilibrium policies. Our experimental results show significant improvements in key performance metrics, such as order response rate and served demand, highlighting the practical utility of controlling agents and their potential to enhance decision-making in PCMAS.
Bayesian Optimization Framework for Efficient Fleet Design in Autonomous Multi-Robot Exploration
Aug 21, 2024



This study addresses the challenge of fleet design optimization in the context of heterogeneous multi-robot fleets, aiming to obtain feasible designs that balance performance and costs. In the domain of autonomous multi-robot exploration, reinforcement learning agents play a central role, offering adaptability to complex terrains and facilitating collaboration among robots. However, modifying the fleet composition results in changes in the learned behavior, and training multi-robot systems using multi-agent reinforcement learning is expensive. Therefore, an exhaustive evaluation of each potential fleet design is infeasible. To tackle these hurdles, we introduce Bayesian Optimization for Fleet Design (BOFD), a framework leveraging multi-objective Bayesian Optimization to explore fleets on the Pareto front of performance and cost while accounting for uncertainty in the design space. Moreover, we establish a sub-linear bound for cumulative regret, supporting BOFD's robustness and efficacy. Extensive benchmark experiments in synthetic and simulated environments demonstrate the superiority of our framework over state-of-the-art methods, achieving efficient fleet designs with minimal fleet evaluations.
Systematic Review on Healthcare Systems Engineering utilizing ChatGPT
May 20, 2024This paper presents an analytical framework for conducting academic reviews in the field of Healthcare Systems Engineering, employing ChatGPT, a state-of-the-art tool among recent language models. We utilized 9,809 abstract paragraphs from conference presentations to systematically review the field. The framework comprises distinct analytical processes, each employing tailored prompts and the systematic use of the ChatGPT API. Through this framework, we organized the target field into 11 topic categories and conducted a comprehensive analysis covering quantitative yearly trends and detailed sub-categories. This effort explores the potential for leveraging ChatGPT to alleviate the burden of academic reviews. Furthermore, it provides valuable insights into the dynamic landscape of Healthcare Systems Engineering research.