 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHypernetwork-based approach for optimal composition design in partially controlled multi-agent systems
Paper and Code
Feb 18, 2025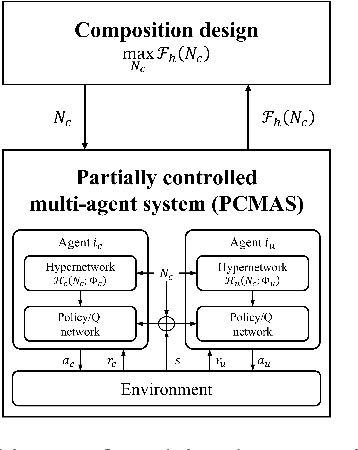

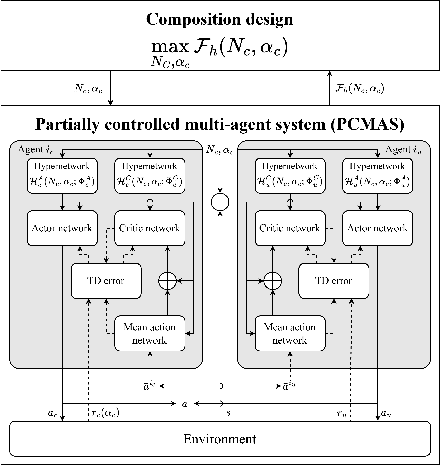
Partially Controlled Multi-Agent Systems (PCMAS) are comprised of controllable agents, managed by a system designer, and uncontrollable agents, operating autonomously. This study addresses an optimal composition design problem in PCMAS, which involves the system designer's problem, determining the optimal number and policies of controllable agents, and the uncontrollable agents' problem, identifying their best-response policies. Solving this bi-level optimization problem is computationally intensive, as it requires repeatedly solving multi-agent reinforcement learning problems under various compositions for both types of agents. To address these challenges, we propose a novel hypernetwork-based framework that jointly optimizes the system's composition and agent policies. Unlike traditional methods that train separate policy networks for each composition, the proposed framework generates policies for both controllable and uncontrollable agents through a unified hypernetwork. This approach enables efficient information sharing across similar configurations, thereby reducing computational overhead. Additional improvements are achieved by incorporating reward parameter optimization and mean action networks. Using real-world New York City taxi data, we demonstrate that our framework outperforms existing methods in approximating equilibrium policies. Our experimental results show significant improvements in key performance metrics, such as order response rate and served demand, highlighting the practical utility of controlling agents and their potential to enhance decision-making in PCMAS.