 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning Jerk-Optimized Trajectory with Discrete-Time Constraints for Redundant Robots
Sep 14, 2019
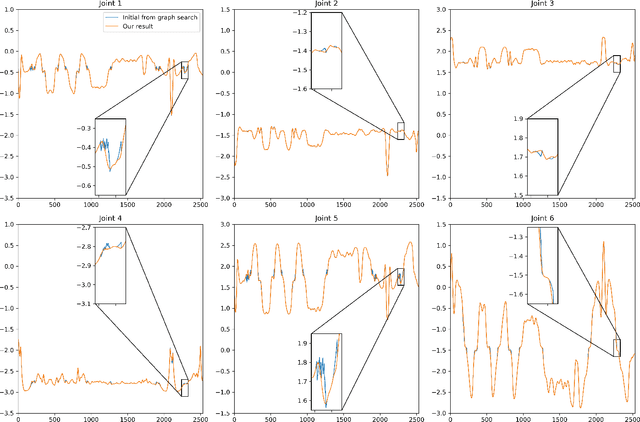
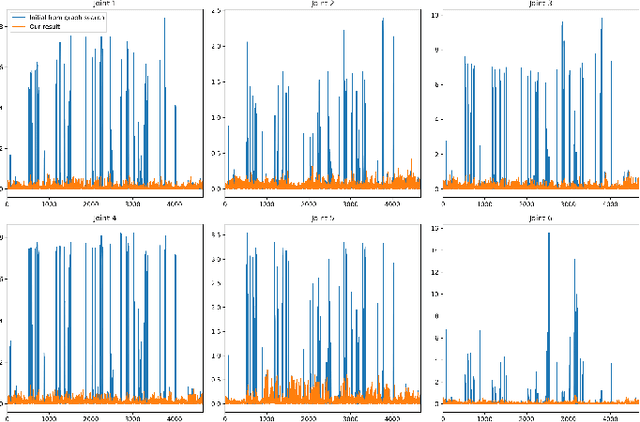
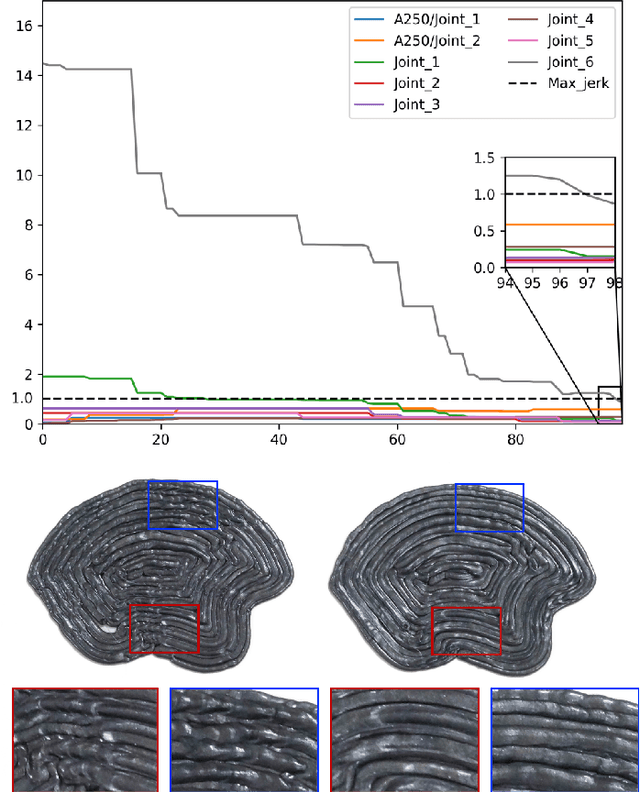
We present a method for effectively planning the motion trajectory of robots in manufacturing tasks, the tool-paths of which are usually complex and have a large number of discrete-time constraints as waypoints. Kinematic redundancy also exists in these robotic systems. The jerk of motion is optimized in our trajectory planning method at the meanwhile of fabrication process to improve the quality of fabrication.
AI in the media and creative industries
May 10, 2019Thanks to the Big Data revolution and increasing computing capacities, Artificial Intelligence (AI) has made an impressive revival over the past few years and is now omnipresent in both research and industry. The creative sectors have always been early adopters of AI technologies and this continues to be the case. As a matter of fact, recent technological developments keep pushing the boundaries of intelligent systems in creative applications: the critically acclaimed movie "Sunspring", released in 2016, was entirely written by AI technology, and the first-ever Music Album, called "Hello World", produced using AI has been released this year. Simultaneously, the exploratory nature of the creative process is raising important technical challenges for AI such as the ability for AI-powered techniques to be accurate under limited data resources, as opposed to the conventional "Big Data" approach, or the ability to process, analyse and match data from multiple modalities (text, sound, images, etc.) at the same time. The purpose of this white paper is to understand future technological advances in AI and their growing impact on creative industries. This paper addresses the following questions: Where does AI operate in creative Industries? What is its operative role? How will AI transform creative industries in the next ten years? This white paper aims to provide a realistic perspective of the scope of AI actions in creative industries, proposes a vision of how this technology could contribute to research and development works in such context, and identifies research and development challenges.