 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCovidAID: COVID-19 Detection Using Chest X-Ray
Apr 21, 2020
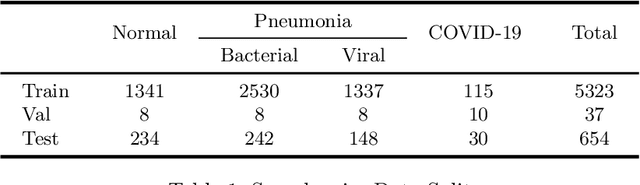

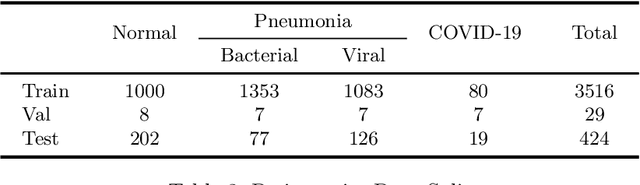
The exponential increase in COVID-19 patients is overwhelming healthcare systems across the world. With limited testing kits, it is impossible for every patient with respiratory illness to be tested using conventional techniques (RT-PCR). The tests also have long turn-around time, and limited sensitivity. Detecting possible COVID-19 infections on Chest X-Ray may help quarantine high risk patients while test results are awaited. X-Ray machines are already available in most healthcare systems, and with most modern X-Ray systems already digitized, there is no transportation time involved for the samples either. In this work we propose the use of chest X-Ray to prioritize the selection of patients for further RT-PCR testing. This may be useful in an inpatient setting where the present systems are struggling to decide whether to keep the patient in the ward along with other patients or isolate them in COVID-19 areas. It would also help in identifying patients with high likelihood of COVID with a false negative RT-PCR who would need repeat testing. Further, we propose the use of modern AI techniques to detect the COVID-19 patients using X-Ray images in an automated manner, particularly in settings where radiologists are not available, and help make the proposed testing technology scalable. We present CovidAID: COVID-19 AI Detector, a novel deep neural network based model to triage patients for appropriate testing. On the publicly available covid-chestxray-dataset [2], our model gives 90.5% accuracy with 100% sensitivity (recall) for the COVID-19 infection. We significantly improve upon the results of Covid-Net [10] on the same dataset.
Camera Relocalization by Computing Pairwise Relative Poses Using Convolutional Neural Network
Aug 01, 2017


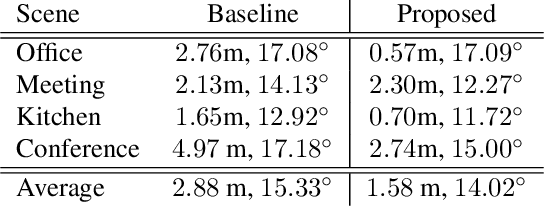
We propose a new deep learning based approach for camera relocalization. Our approach localizes a given query image by using a convolutional neural network (CNN) for first retrieving similar database images and then predicting the relative pose between the query and the database images, whose poses are known. The camera location for the query image is obtained via triangulation from two relative translation estimates using a RANSAC based approach. Each relative pose estimate provides a hypothesis for the camera orientation and they are fused in a second RANSAC scheme. The neural network is trained for relative pose estimation in an end-to-end manner using training image pairs. In contrast to previous work, our approach does not require scene-specific training of the network, which improves scalability, and it can also be applied to scenes which are not available during the training of the network. As another main contribution, we release a challenging indoor localisation dataset covering 5 different scenes registered to a common coordinate frame. We evaluate our approach using both our own dataset and the standard 7 Scenes benchmark. The results show that the proposed approach generalizes well to previously unseen scenes and compares favourably to other recent CNN-based methods.