 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCAROM Air -- Vehicle Localization and Traffic Scene Reconstruction from Aerial Videos
May 31, 2023Road traffic scene reconstruction from videos has been desirable by road safety regulators, city planners, researchers, and autonomous driving technology developers. However, it is expensive and unnecessary to cover every mile of the road with cameras mounted on the road infrastructure. This paper presents a method that can process aerial videos to vehicle trajectory data so that a traffic scene can be automatically reconstructed and accurately re-simulated using computers. On average, the vehicle localization error is about 0.1 m to 0.3 m using a consumer-grade drone flying at 120 meters. This project also compiles a dataset of 50 reconstructed road traffic scenes from about 100 hours of aerial videos to enable various downstream traffic analysis applications and facilitate further road traffic related research. The dataset is available at https://github.com/duolu/CAROM.
CAROM -- Vehicle Localization and Traffic Scene Reconstruction from Monocular Cameras on Road Infrastructures
Apr 02, 2021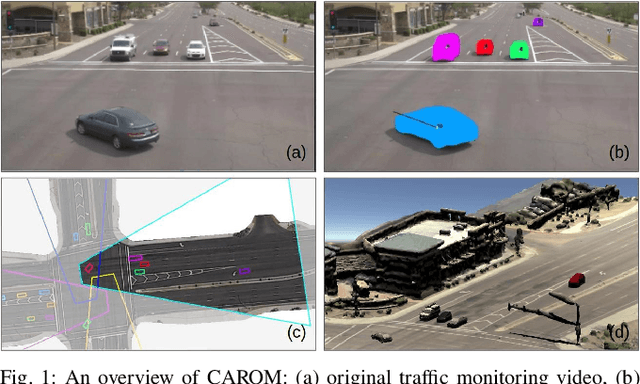
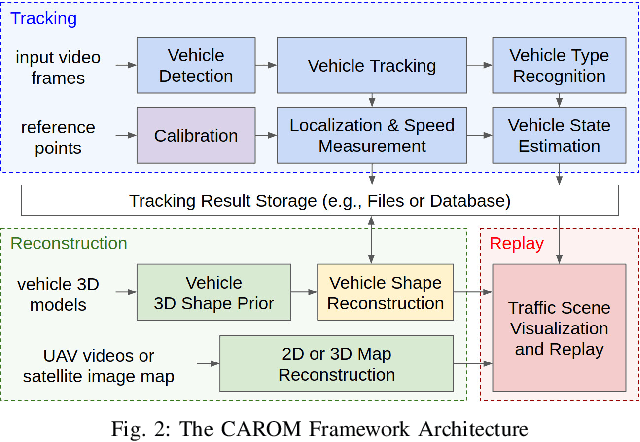
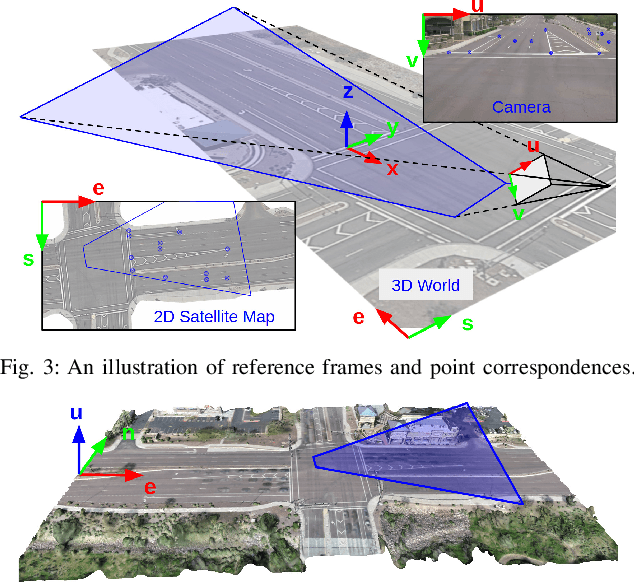
Traffic monitoring cameras are powerful tools for traffic management and essential components of intelligent road infrastructure systems. In this paper, we present a vehicle localization and traffic scene reconstruction framework using these cameras, dubbed as CAROM, i.e., "CARs On the Map". CAROM processes traffic monitoring videos and converts them to anonymous data structures of vehicle type, 3D shape, position, and velocity for traffic scene reconstruction and replay. Through collaborating with a local department of transportation in the United States, we constructed a benchmarking dataset containing GPS data, roadside camera videos, and drone videos to validate the vehicle tracking results. On average, the localization error is approximately 0.8 m and 1.7 m within the range of 50 m and 120 m from the cameras, respectively.