 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgile Reactive Navigation for A Non-Holonomic Mobile Robot Using A Pixel Processor Array
Sep 27, 2020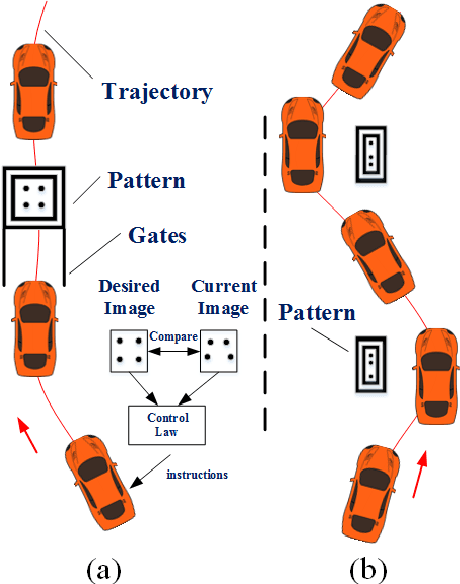
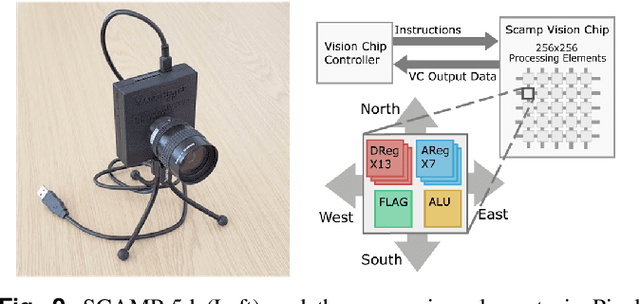
This paper presents an agile reactive navigation strategy for driving a non-holonomic ground vehicle around a preset course of gates in a cluttered environment using a low-cost processor array sensor. This enables machine vision tasks to be performed directly upon the sensor's image plane, rather than using a separate general-purpose computer. We demonstrate a small ground vehicle running through or avoiding multiple gates at high speed using minimal computational resources. To achieve this, target tracking algorithms are developed for the Pixel Processing Array and captured images are then processed directly on the vision sensor acquiring target information for controlling the ground vehicle. The algorithm can run at up to 2000 fps outdoors and 200fps at indoor illumination levels. Conducting image processing at the sensor level avoids the bottleneck of image transfer encountered in conventional sensors. The real-time performance of on-board image processing and robustness is validated through experiments. Experimental results demonstrate that the algorithm's ability to enable a ground vehicle to navigate at an average speed of 2.20 m/s for passing through multiple gates and 3.88 m/s for a 'slalom' task in an environment featuring significant visual clutter.
Fully Embedding Fast Convolutional Networks on Pixel Processor Arrays
Apr 27, 2020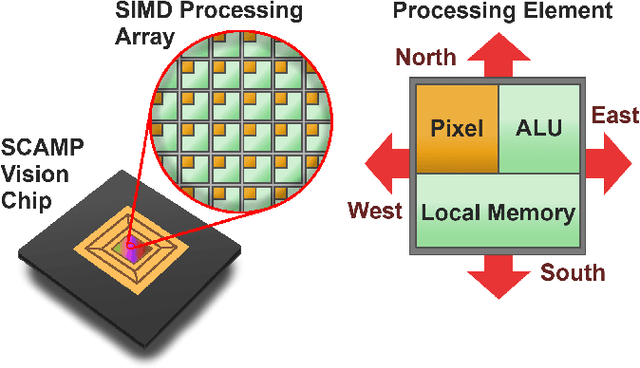
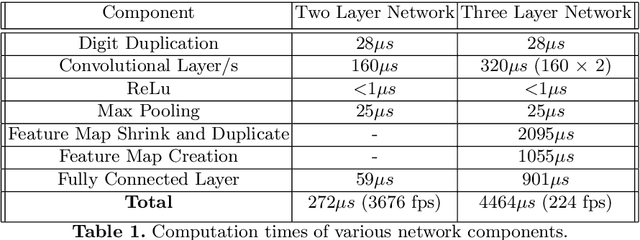
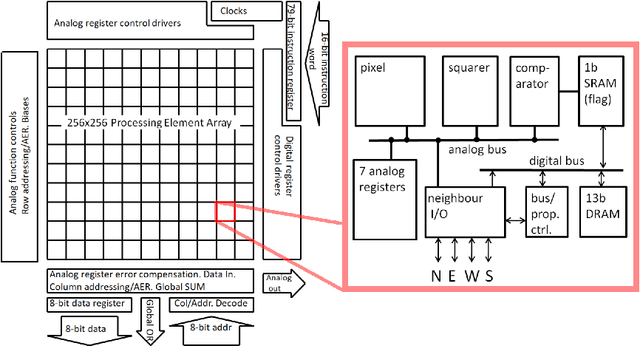
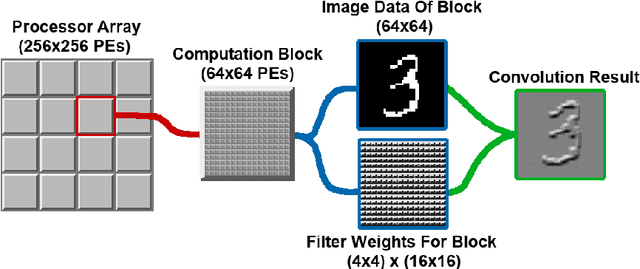
We present a novel method of CNN inference for pixel processor array (PPA) vision sensors, designed to take advantage of their massive parallelism and analog compute capabilities. PPA sensors consist of an array of processing elements (PEs), with each PE capable of light capture, data storage and computation, allowing various computer vision processing to be executed directly upon the sensor device. The key idea behind our approach is storing network weights "in-pixel" within the PEs of the PPA sensor itself to allow various computations, such as multiple different image convolutions, to be carried out in parallel. Our approach can perform convolutional layers, max pooling, ReLu, and a final fully connected layer entirely upon the PPA sensor, while leaving no untapped computational resources. This is in contrast to previous works that only use a sensor-level processing to sequentially compute image convolutions, and must transfer data to an external digital processor to complete the computation. We demonstrate our approach on the SCAMP-5 vision system, performing inference of a MNIST digit classification network at over 3000 frames per second and over 93% classification accuracy. This is the first work demonstrating CNN inference conducted entirely upon the processor array of a PPA vision sensor device, requiring no external processing.
A Camera That CNNs: Towards Embedded Neural Networks on Pixel Processor Arrays
Sep 13, 2019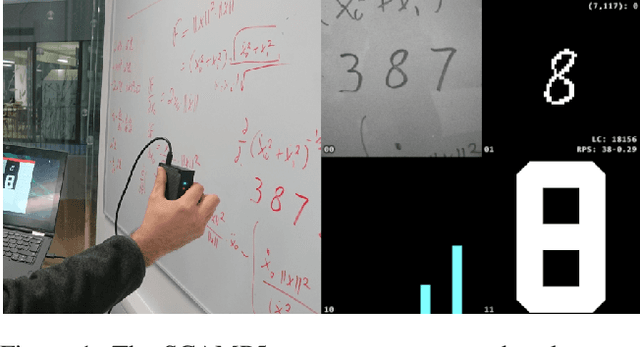
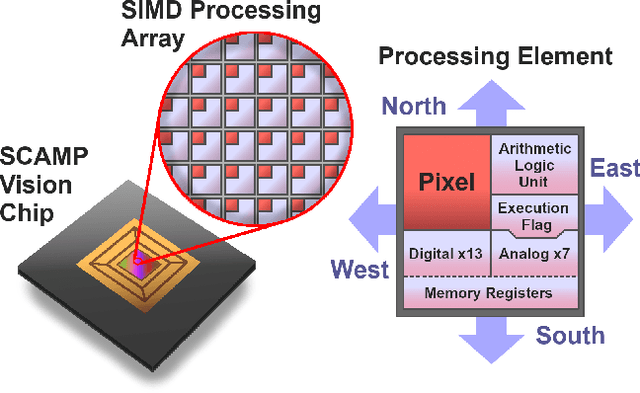
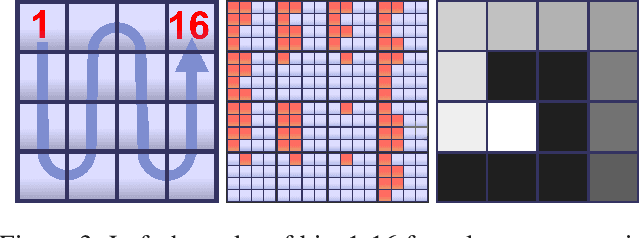
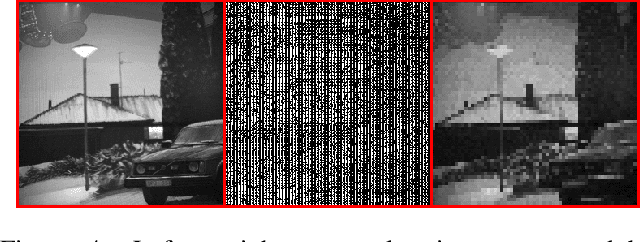
We present a convolutional neural network implementation for pixel processor array (PPA) sensors. PPA hardware consists of a fine-grained array of general-purpose processing elements, each capable of light capture, data storage, program execution, and communication with neighboring elements. This allows images to be stored and manipulated directly at the point of light capture, rather than having to transfer images to external processing hardware. Our CNN approach divides this array up into 4x4 blocks of processing elements, essentially trading-off image resolution for increased local memory capacity per 4x4 "pixel". We implement parallel operations for image addition, subtraction and bit-shifting images in this 4x4 block format. Using these components we formulate how to perform ternary weight convolutions upon these images, compactly store results of such convolutions, perform max-pooling, and transfer the resulting sub-sampled data to an attached micro-controller. We train ternary weight filter CNNs for digit recognition and a simple tracking task, and demonstrate inference of these networks upon the SCAMP5 PPA system. This work represents a first step towards embedding neural network processing capability directly onto the focal plane of a sensor.