 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlatform-Aware Mission Planning
Jan 16, 2025


Planning for autonomous systems typically requires reasoning with models at different levels of abstraction, and the harmonization of two competing sets of objectives: high-level mission goals that refer to an interaction of the system with the external environment, and low-level platform constraints that aim to preserve the integrity and the correct interaction of the subsystems. The complicated interplay between these two models makes it very hard to reason on the system as a whole, especially when the objective is to find plans with robustness guarantees, considering the non-deterministic behavior of the lower layers of the system. In this paper, we introduce the problem of Platform-Aware Mission Planning (PAMP), addressing it in the setting of temporal durative actions. The PAMP problem differs from standard temporal planning for its exists-forall nature: the high-level plan dealing with mission goals is required to satisfy safety and executability constraints, for all the possible non-deterministic executions of the low-level model of the platform and the environment. We propose two approaches for solving PAMP. The first baseline approach amalgamates the mission and platform levels, while the second is based on an abstraction-refinement loop that leverages the combination of a planner and a verification engine. We prove the soundness and completeness of the proposed approaches and validate them experimentally, demonstrating the importance of heterogeneous modeling and the superiority of the technique based on abstraction-refinement.
Automatic Generation of Scenarios for System-level Simulation-based Verification of Autonomous Driving Systems
Nov 16, 2023

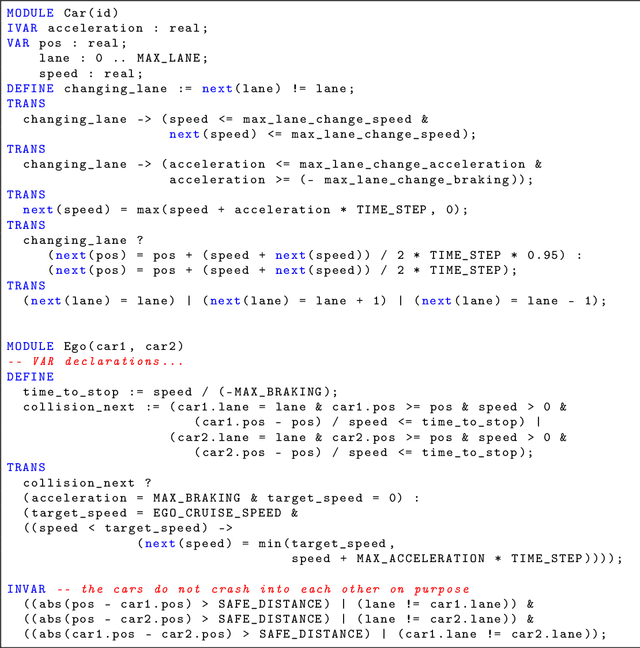
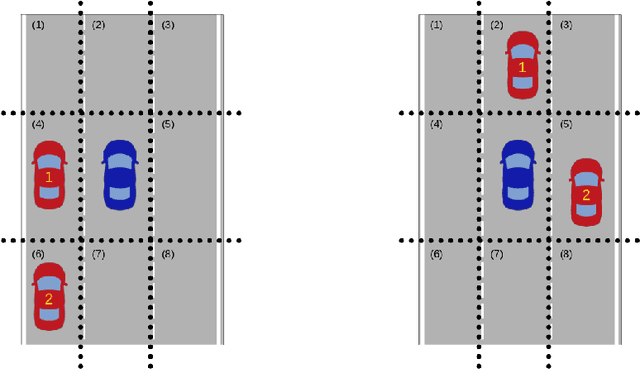
With increasing complexity of Automated Driving Systems (ADS), ensuring their safety and reliability has become a critical challenge. The Verification and Validation (V&V) of these systems are particularly demanding when AI components are employed to implement perception and/or control functions. In ESA-funded project VIVAS, we developed a generic framework for system-level simulation-based V&V of autonomous systems. The approach is based on a simulation model of the system, an abstract model that describes symbolically the system behavior, and formal methods to generate scenarios and verify the simulation executions. Various coverage criteria can be defined to guide the automated generation of the scenarios. In this paper, we describe the instantiation of the VIVAS framework for an ADS case study. This is based on the integration of CARLA, a widely-used driving simulator, and its ScenarioRunner tool, which enables the creation of diverse and complex driving scenarios. This is also used in the CARLA Autonomous Driving Challenge to validate different ADS agents for perception and control based on AI, shared by the CARLA community. We describe the development of an abstract ADS model and the formulation of a coverage criterion that focuses on the behaviors of vehicles relative to the vehicle with ADS under verification. Leveraging the VIVAS framework, we generate and execute various driving scenarios, thus testing the capabilities of the AI components. The results show the effectiveness of VIVAS in automatically generating scenarios for system-level simulation-based V&V of an automated driving system using CARLA and ScenarioRunner. Therefore, they highlight the potential of the approach as a powerful tool in the future of ADS V&V methodologies.
* In Proceedings FMAS 2023, arXiv:2311.08987
A first-order logic characterization of safety and co-safety languages
Sep 19, 2022


Linear Temporal Logic (LTL) is one of the most popular temporal logics, that comes into play in a variety of branches of computer science. Among the various reasons of its widespread use there are its strong foundational properties: LTL is equivalent to counter-free omega-automata, to star-free omega-regular expressions, and (by Kamp's theorem) to the first-order theory of one successor (S1S[FO]). Safety and co-safety languages, where a finite prefix suffices to establish whether a word does not belong or belongs to the language, respectively, play a crucial role in lowering the complexity of problems like model checking and reactive synthesis for LTL. SafetyLTL (resp., coSafetyLTL) is a fragment of LTL where only universal (resp., existential) temporal modalities are allowed, that recognises safety (resp., co-safety) languages only. The main contribution of this paper is the introduction of a fragment of S1S[FO], called SafetyFO, and of its dual coSafetyFO, which are expressively complete with respect to the LTL-definable safety and co-safety languages. We prove that they exactly characterize SafetyLTL and coSafetyLTL, respectively, a result that joins Kamp's theorem, and provides a clearer view of the characterization of (fragments of) LTL in terms of first-order languages. In addition, it gives a direct, compact, and self-contained proof that any safety language definable in LTL is definable in SafetyLTL as well. As a by-product, we obtain some interesting results on the expressive power of the weak tomorrow operator of SafetyLTL, interpreted over finite and infinite words. Moreover, we prove that, when interpreted over finite words, SafetyLTL (resp. coSafetyLTL) devoid of the tomorrow (resp., weak tomorrow) operator captures the safety (resp., co-safety) fragment of LTL over finite words.